
目录
快速导航-
智能车辆环境感知与目标检测技术专刊 | 基于多尺度特征融合的车辆及行人目标检测算法*
智能车辆环境感知与目标检测技术专刊 | 基于多尺度特征融合的车辆及行人目标检测算法*
-
智能车辆环境感知与目标检测技术专刊 | 基于YOLO算法的非机动车辆检测模型*
智能车辆环境感知与目标检测技术专刊 | 基于YOLO算法的非机动车辆检测模型*
-
智能车辆环境感知与目标检测技术专刊 | 基于改进YOLOv7的红外行人目标检测方法
智能车辆环境感知与目标检测技术专刊 | 基于改进YOLOv7的红外行人目标检测方法
-
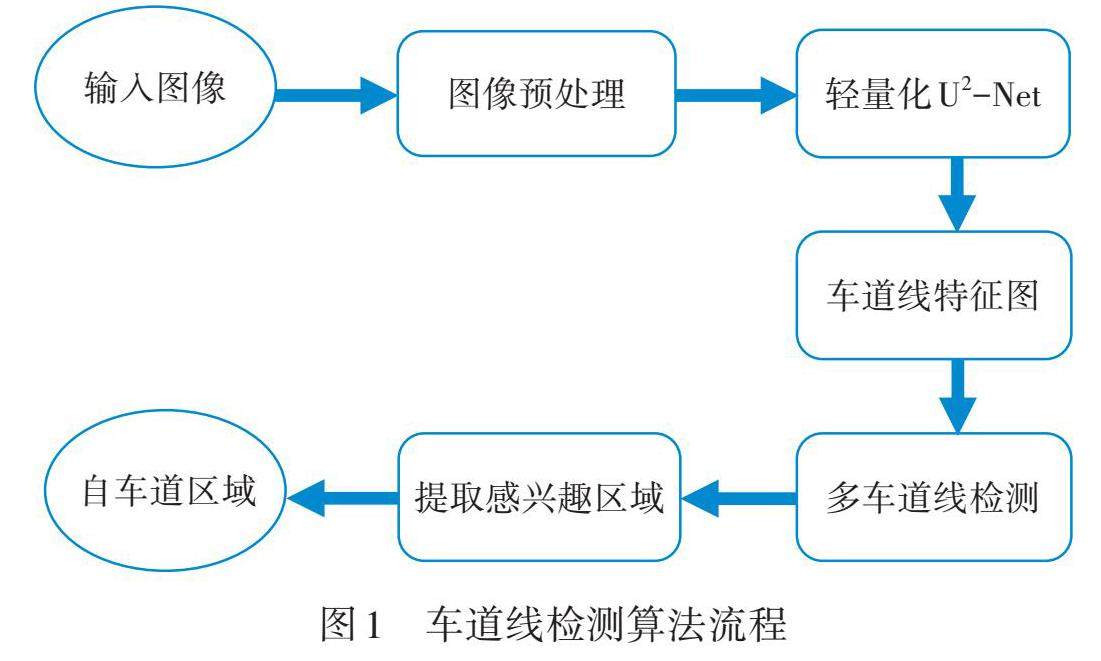
智能车辆环境感知与目标检测技术专刊 | 基于轻量化U2-Net的车道线检测算法研究*
智能车辆环境感知与目标检测技术专刊 | 基于轻量化U2-Net的车道线检测算法研究*
-
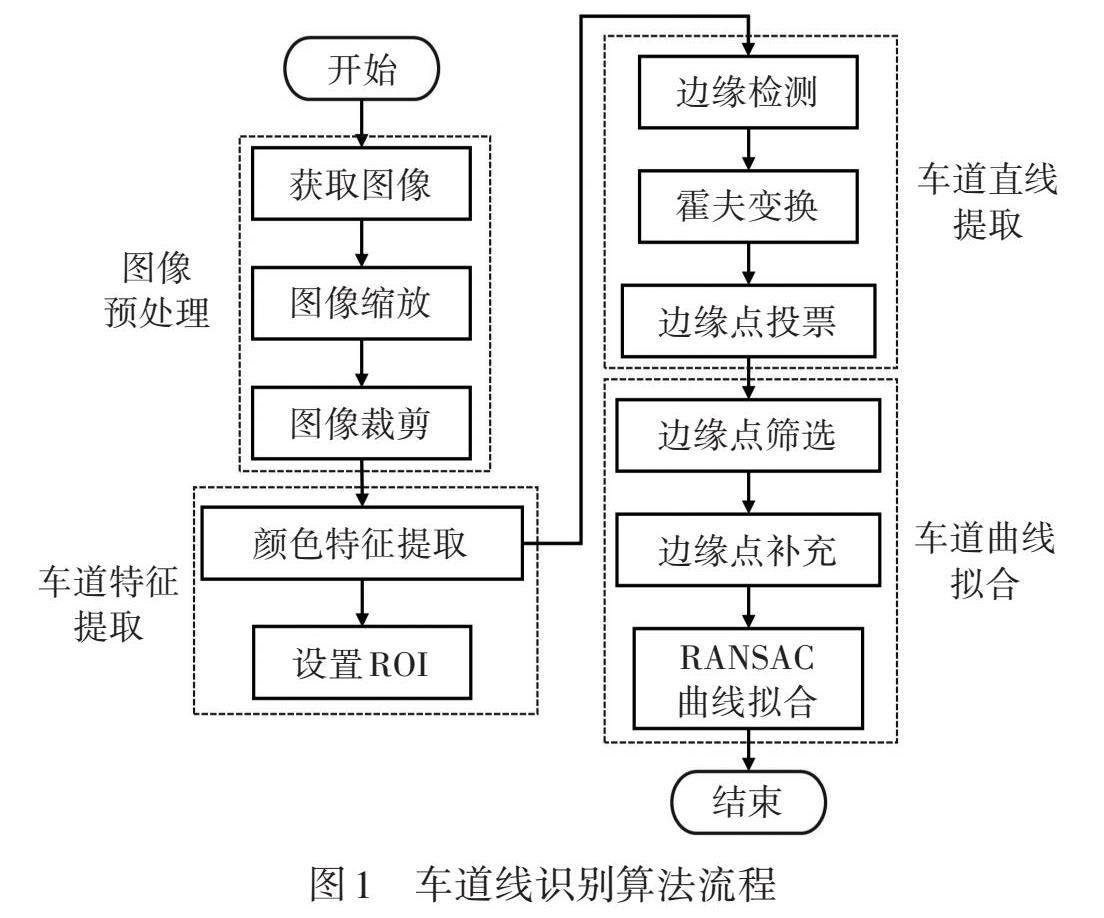
智能车辆环境感知与目标检测技术专刊 | 基于特征提取与边缘点投票的实时车道线识别*
智能车辆环境感知与目标检测技术专刊 | 基于特征提取与边缘点投票的实时车道线识别*
-
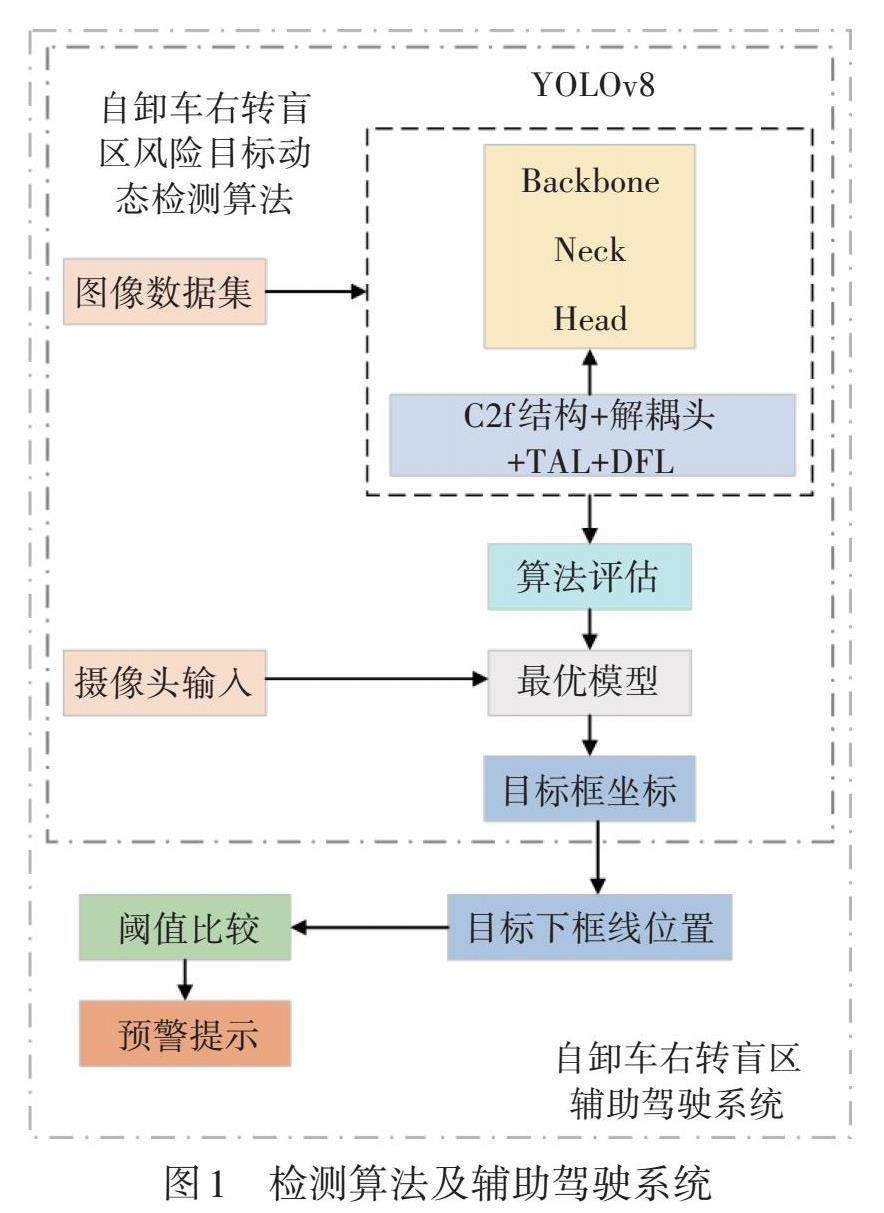
智能车辆环境感知与目标检测技术专刊 | 自卸车右转盲区风险目标动态检测算法研究
智能车辆环境感知与目标检测技术专刊 | 自卸车右转盲区风险目标动态检测算法研究
-
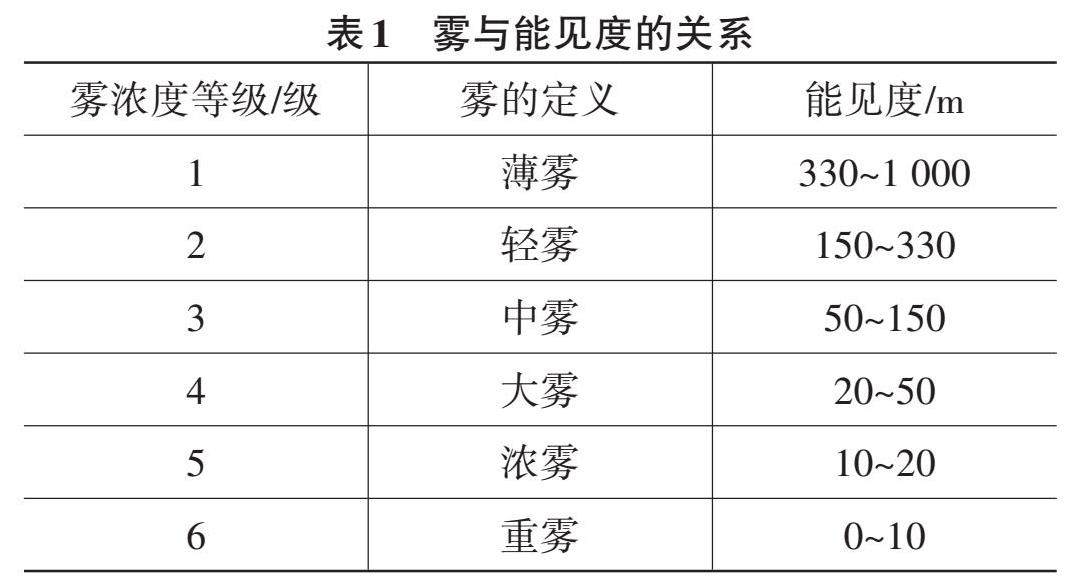
智能车辆环境感知与目标检测技术专刊 | 基于引导滤波的车载视频图像去雾简化模型
智能车辆环境感知与目标检测技术专刊 | 基于引导滤波的车载视频图像去雾简化模型



















 登录
登录