
目录
快速导航-
设计与研究 | 基于改进鲸鱼算法的搬运机器人运动规划
设计与研究 | 基于改进鲸鱼算法的搬运机器人运动规划
-
设计与研究 | 基于MTF-gcForest的带钢表面缺陷分类方法研究
设计与研究 | 基于MTF-gcForest的带钢表面缺陷分类方法研究
-
设计与研究 | 冲击载荷下某船用起重机贮存强度评估
设计与研究 | 冲击载荷下某船用起重机贮存强度评估
-
交通工程技术 | 列车万向轴故障电机端识别方法研究
交通工程技术 | 列车万向轴故障电机端识别方法研究
-
交通工程技术 | 铁路车轴微动磨损对微动裂纹扩展的影响研究
交通工程技术 | 铁路车轴微动磨损对微动裂纹扩展的影响研究
-
交通工程技术 | 含膨胀元件的接触网与受电弓动力学特性分析
交通工程技术 | 含膨胀元件的接触网与受电弓动力学特性分析
-
产品开发与设计 | 基于改进EfficientNet的化纤色泽品质分类系统
产品开发与设计 | 基于改进EfficientNet的化纤色泽品质分类系统
-
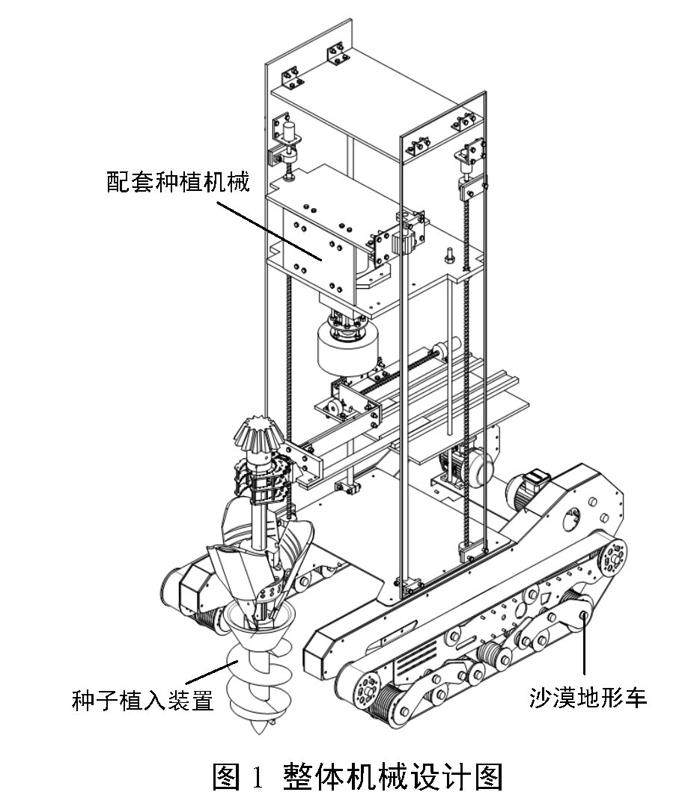
产品开发与设计 | 一种防风固沙植被培养机械的设计
产品开发与设计 | 一种防风固沙植被培养机械的设计
-
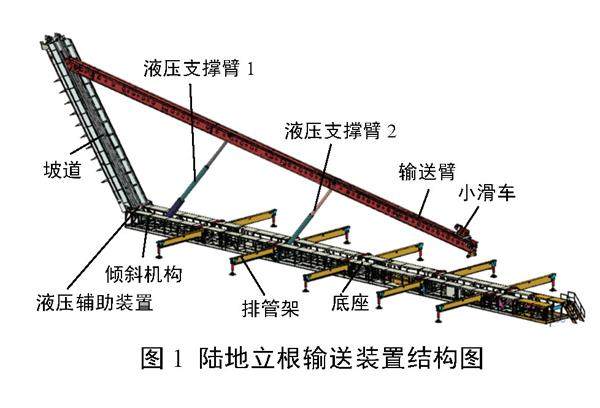
产品开发与设计 | 一种立根自动输送装置的设计
产品开发与设计 | 一种立根自动输送装置的设计
-
零部件分析与设计 | 基于参数化直动滚子从动件盘形凸轮仿真加工研究
零部件分析与设计 | 基于参数化直动滚子从动件盘形凸轮仿真加工研究
-
零部件分析与设计 | 分子泵用无位置传感器无刷直流电机控制器设计
零部件分析与设计 | 分子泵用无位置传感器无刷直流电机控制器设计
-
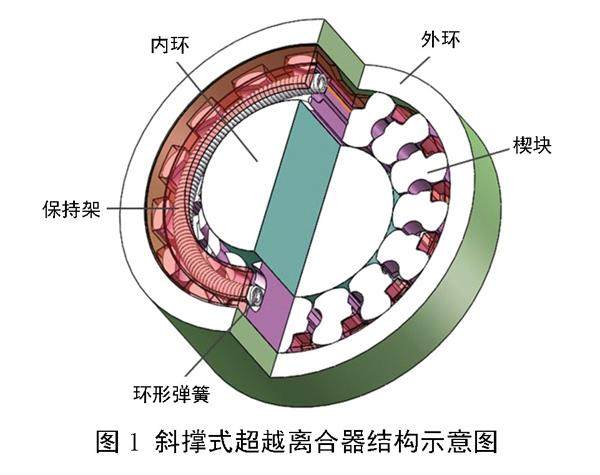
零部件分析与设计 | 高速斜撑超越离合器楔合动态响应研究
零部件分析与设计 | 高速斜撑超越离合器楔合动态响应研究











 登录
登录