
目录
快速导航-

计算机科学 | 基于语义先验和纹理增强引导的壁画修复算法
计算机科学 | 基于语义先验和纹理增强引导的壁画修复算法
-

计算机科学 | 基于多模态学习的高动态范围图像色调映射
计算机科学 | 基于多模态学习的高动态范围图像色调映射
-

计算机科学 | 基于深度自监督学习的可微分半色调框架
计算机科学 | 基于深度自监督学习的可微分半色调框架
-

计算机科学 | 时序无关和鲁棒性增强的遥感影像变化检测方法
计算机科学 | 时序无关和鲁棒性增强的遥感影像变化检测方法
-

计算机科学 | 基于退化分布感知的迭代式水下图像增强网络
计算机科学 | 基于退化分布感知的迭代式水下图像增强网络
-
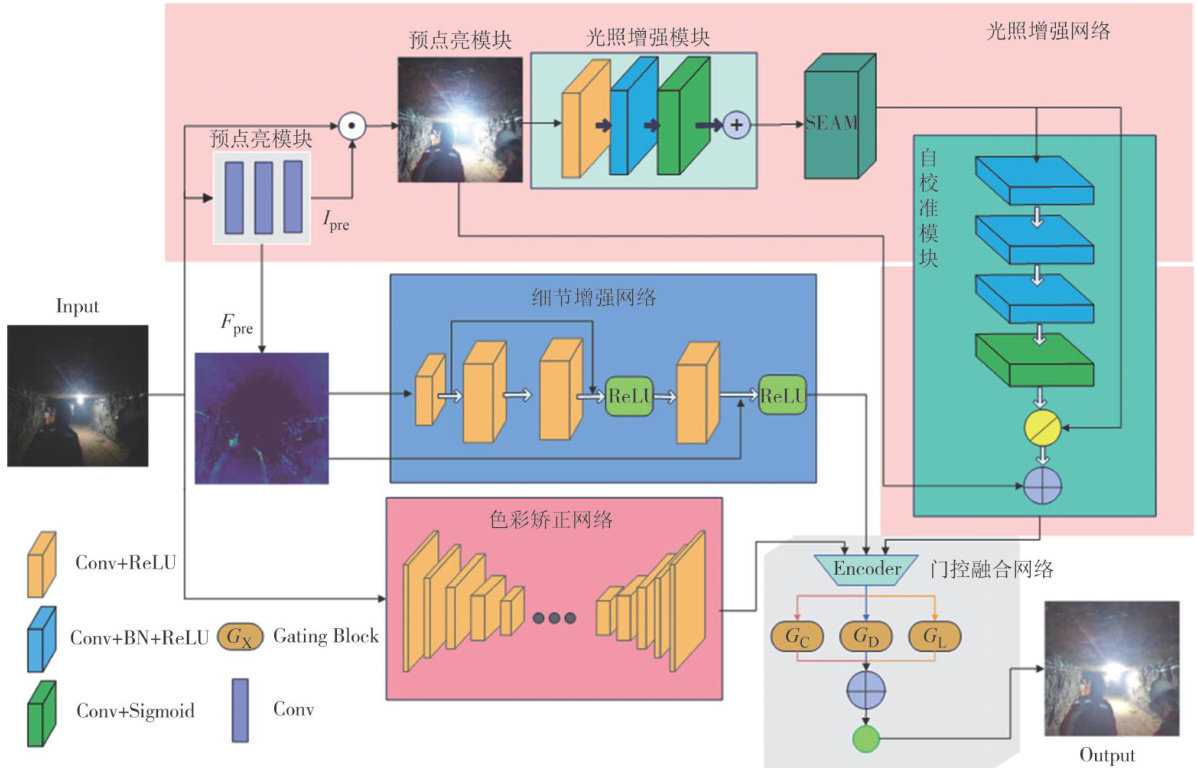
计算机科学 | 基于MCGN煤矿井下低光照图像增强方法研究
计算机科学 | 基于MCGN煤矿井下低光照图像增强方法研究
-
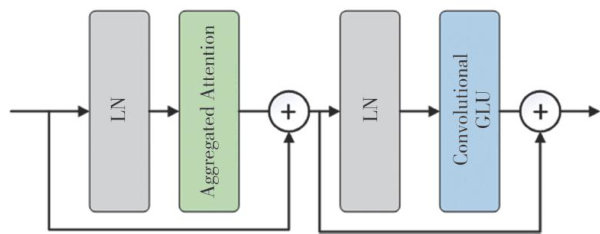
计算机科学 | 基于TransNeXt的红外与可见光图像融合
计算机科学 | 基于TransNeXt的红外与可见光图像融合
-

计算机科学 | 基于双重注意力融合的三维目标检测方法
计算机科学 | 基于双重注意力融合的三维目标检测方法
-
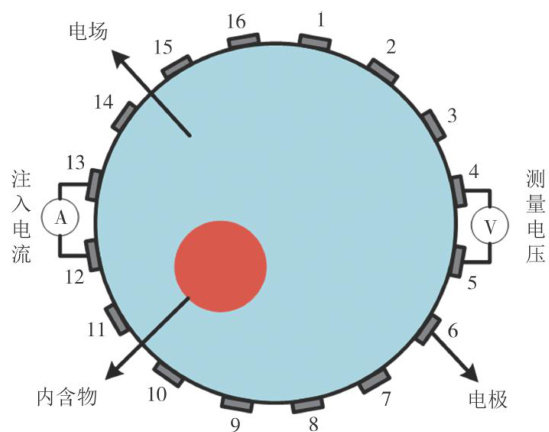
计算机科学 | 基于多机制动态搜索的电阻抗成像方法研究
计算机科学 | 基于多机制动态搜索的电阻抗成像方法研究
-

计算机科学 | 基于改进A\*算法的轮式巡检机器人路径规划方法
计算机科学 | 基于改进A\*算法的轮式巡检机器人路径规划方法
-

计算机科学 | 基于关键帧的双模式车辆激光SLAM
计算机科学 | 基于关键帧的双模式车辆激光SLAM
-

计算机科学 | 基于机器学习的功能覆盖率预测算法
计算机科学 | 基于机器学习的功能覆盖率预测算法
-
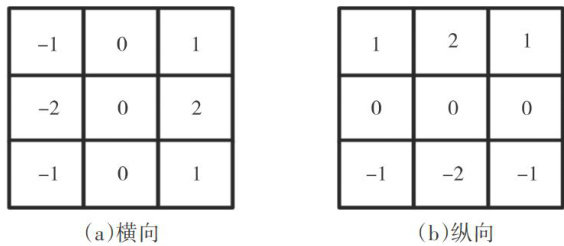
计算机科学 | 超长指令字DSP上的多方向Sobel算法实现与优化
计算机科学 | 超长指令字DSP上的多方向Sobel算法实现与优化
-

计算机科学 | 基于CNN-SLinformer算法的风电机组偏航系统故障预测
计算机科学 | 基于CNN-SLinformer算法的风电机组偏航系统故障预测
-
计算机科学 | 基于SVD-CKF的战术导弹气动参数在线辨识方法研究
计算机科学 | 基于SVD-CKF的战术导弹气动参数在线辨识方法研究
-

计算机科学 | 基于结构多维特征构建图卷积神经网络的结构损伤识别方法
计算机科学 | 基于结构多维特征构建图卷积神经网络的结构损伤识别方法
-

计算机科学 | SaS分布噪声下基于特征值调和平均的稳健频谱感知算法
计算机科学 | SaS分布噪声下基于特征值调和平均的稳健频谱感知算法
-

材料科学与工程 | 等径角挤压工艺制备铝基复合材料的性能特征研究
材料科学与工程 | 等径角挤压工艺制备铝基复合材料的性能特征研究
-

材料科学与工程 | 磁场对MFeO4(M ∘leddash Fe,Co,Ni或Zn)铁氧体OER性能的作用机制研究
材料科学与工程 | 磁场对MFeO4(M ∘leddash Fe,Co,Ni或Zn)铁氧体OER性能的作用机制研究
-

材料科学与工程 | TiO2 添加量对ZTA陶瓷及ZTA/ZMn13复合材料 力学性能的影响
材料科学与工程 | TiO2 添加量对ZTA陶瓷及ZTA/ZMn13复合材料 力学性能的影响
 ,研究了铁氧体中 M2+ 的种类和外磁场特性对催化剂OER性能的影响.结果表明:炭纸负载的 NiFe2O4(NFO-Ms/C) 具有优异的OER性能,在 10mA?cm-2 时的过电位为 409mV 、Tafel斜率为 78.9mV?dec-1 、电化学活性表面积为1.6mF?cm-2 ,这主要是因为 NiFe2O4 中存在较多的高价态 M3+ 和较低的导电率、丰富的氧空位,有利于加快OER反应的速率.稳定性测试表明, 60h 后 NFO-Ms/C 的过电位仅升高 5% 左右,这主要是由于催化剂不断由 Ni2+ 转变为高活性的 N3+ ,保持着较好的催化活性.外界交变磁场能提高 NFO-Ms/C 的OER性能,当交变磁场强度为 4.320mT ,NFO-Ms/C的过电位由 455mV 下降到了 315mV ( 10mA?cm-2 ,降低了 30.8% ,这是由于交变磁场生成的感生电场使电极表面活性物质OH增多提升了电极电势,磁热效应提供额外能量加速电荷传输.
,研究了铁氧体中 M2+ 的种类和外磁场特性对催化剂OER性能的影响.结果表明:炭纸负载的 NiFe2O4(NFO-Ms/C) 具有优异的OER性能,在 10mA?cm-2 时的过电位为 409mV 、Tafel斜率为 78.9mV?dec-1 、电化学活性表面积为1.6mF?cm-2 ,这主要是因为 NiFe2O4 中存在较多的高价态 M3+ 和较低的导电率、丰富的氧空位,有利于加快OER反应的速率.稳定性测试表明, 60h 后 NFO-Ms/C 的过电位仅升高 5% 左右,这主要是由于催化剂不断由 Ni2+ 转变为高活性的 N3+ ,保持着较好的催化活性.外界交变磁场能提高 NFO-Ms/C 的OER性能,当交变磁场强度为 4.320mT ,NFO-Ms/C的过电位由 455mV 下降到了 315mV ( 10mA?cm-2 ,降低了 30.8% ,这是由于交变磁场生成的感生电场使电极表面活性物质OH增多提升了电极电势,磁热效应提供额外能量加速电荷传输. 添加量为 2% (质量分数)时,ZTA陶瓷具有最佳的综合性能:相对密度达到最高,为 98.73% ,抗弯强度为( 429.60±24.56 ) MPa ,维氏硬度(HV)为L (1691.73±120.65 ) N/mm2 ;断裂韧性为 7.24±0.38 ) MPa?m1/2 1450°C 下,ZTA与 ZMn13 熔液的接触角随 TiO2 添加量增加而减小,这是因为ZTA表面的 TiO2 会与 ZMn13 基体之间通过Ti—O—Fe键相连接,从而改善ZTA与 ZMn13 基体的界面润湿性;以ZTA陶瓷颗粒所制备的三维多孔预制体在 1450°C 浇铸制备ZTA/ZMn13复合材料,材料的抗弯强度随ZTA中 TiO2 含量的提高先增加后下降,当 TiO2 含量为 2% (质量分数)时,其抗弯强度达到最大值 273.63MPa ;相较于不含 TiO2 的ZTA制备的 ZTA/ZMn13 复合材料 (201.72MPa ),其强度提高了 35.65% ,三体磨损条件下耐磨性提高了 21.98%
添加量为 2% (质量分数)时,ZTA陶瓷具有最佳的综合性能:相对密度达到最高,为 98.73% ,抗弯强度为( 429.60±24.56 ) MPa ,维氏硬度(HV)为L (1691.73±120.65 ) N/mm2 ;断裂韧性为 7.24±0.38 ) MPa?m1/2 1450°C 下,ZTA与 ZMn13 熔液的接触角随 TiO2 添加量增加而减小,这是因为ZTA表面的 TiO2 会与 ZMn13 基体之间通过Ti—O—Fe键相连接,从而改善ZTA与 ZMn13 基体的界面润湿性;以ZTA陶瓷颗粒所制备的三维多孔预制体在 1450°C 浇铸制备ZTA/ZMn13复合材料,材料的抗弯强度随ZTA中 TiO2 含量的提高先增加后下降,当 TiO2 含量为 2% (质量分数)时,其抗弯强度达到最大值 273.63MPa ;相较于不含 TiO2 的ZTA制备的 ZTA/ZMn13 复合材料 (201.72MPa ),其强度提高了 35.65% ,三体磨损条件下耐磨性提高了 21.98% 














 登录
登录