
目录
快速导航-
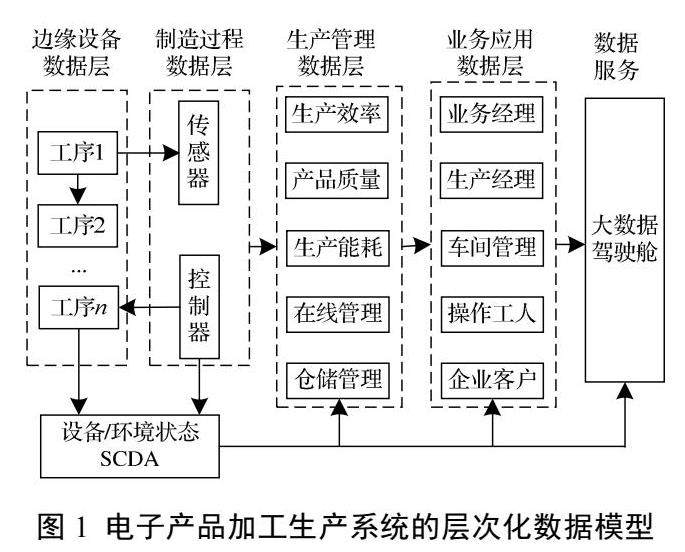
设计与研究 | 智能终端生产系统层次化数据模型及数据应用架构设计
设计与研究 | 智能终端生产系统层次化数据模型及数据应用架构设计
-
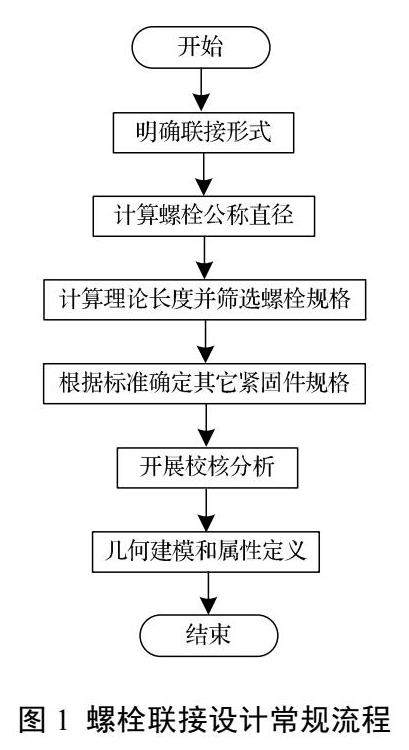
设计与研究 | 基于知识工程和二次开发的船舶螺栓联接设计
设计与研究 | 基于知识工程和二次开发的船舶螺栓联接设计
-
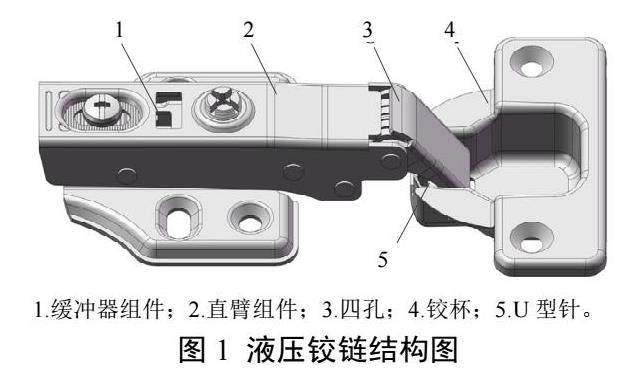
设计与研究 | 液压铰链铰杯自动上料机构设计
设计与研究 | 液压铰链铰杯自动上料机构设计
-
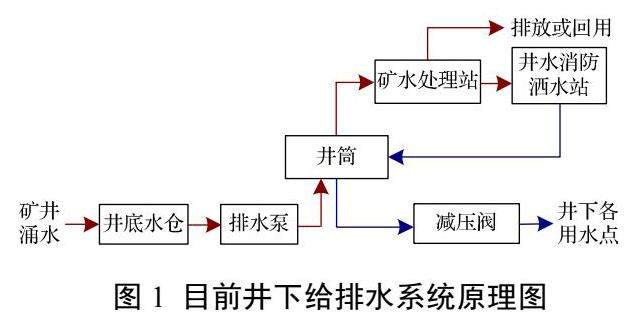
设计与研究 | 基于抽水蓄能的井下给排水两用能量回收系统
设计与研究 | 基于抽水蓄能的井下给排水两用能量回收系统
-

交通工程技术 | 基于轮轨力测量的新型轨道交通轮对智能运维监测系统研制
交通工程技术 | 基于轮轨力测量的新型轨道交通轮对智能运维监测系统研制
-
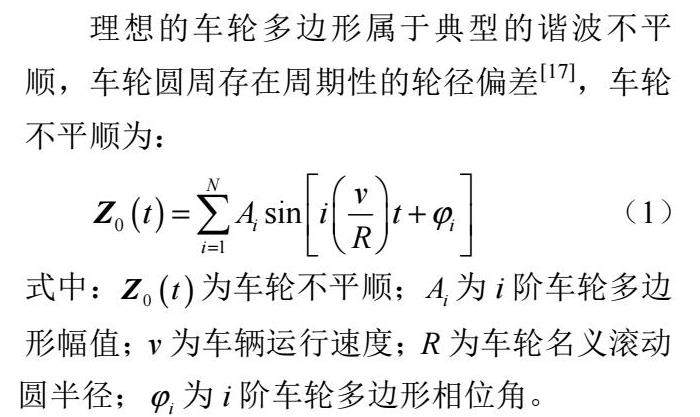
交通工程技术 | 一种考虑车轮多边形的转向架故障诊断深度学习方法
交通工程技术 | 一种考虑车轮多边形的转向架故障诊断深度学习方法
-
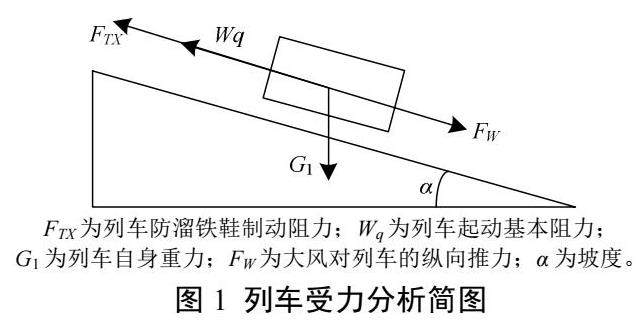
交通工程技术 | 重载条件下防溜铁鞋在风区不同路段应用防溜效果分析
交通工程技术 | 重载条件下防溜铁鞋在风区不同路段应用防溜效果分析
-
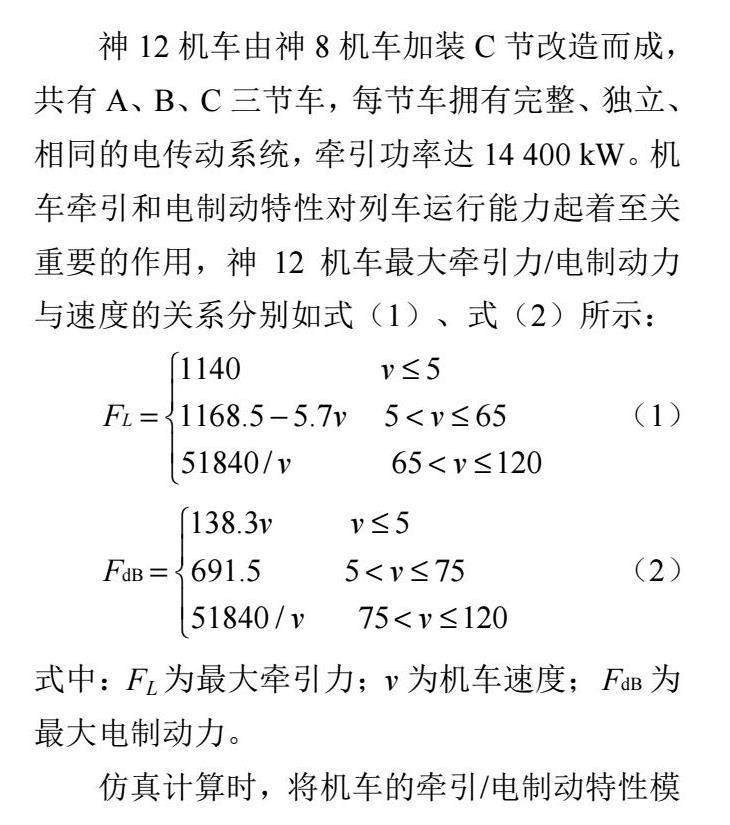
零部件分析与设计 | 神朔铁路万t组合列车车钩力研究及操纵优化
零部件分析与设计 | 神朔铁路万t组合列车车钩力研究及操纵优化
-
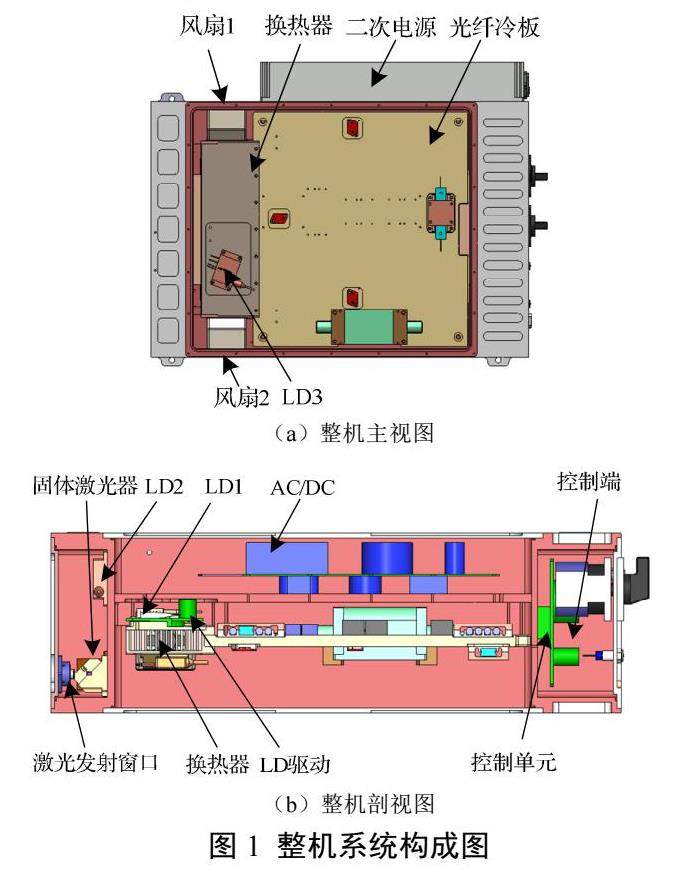
零部件分析与设计 | 固体激光器关键电子器件热设计与分析
零部件分析与设计 | 固体激光器关键电子器件热设计与分析
-
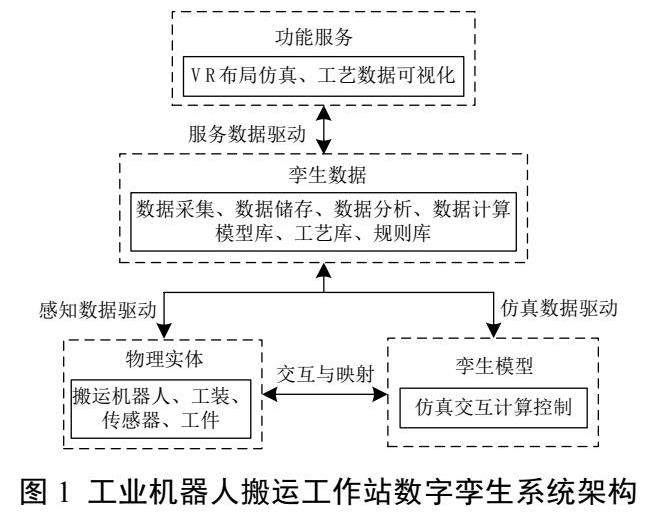
机器人技术 | 基于数字孪生的机器人搬运工作站仿真系统设计与实现
机器人技术 | 基于数字孪生的机器人搬运工作站仿真系统设计与实现
-

机器人技术 | 基于视觉与激光融合的柔性压裂管线检测机器人
机器人技术 | 基于视觉与激光融合的柔性压裂管线检测机器人











 登录
登录