
目录
快速导航-
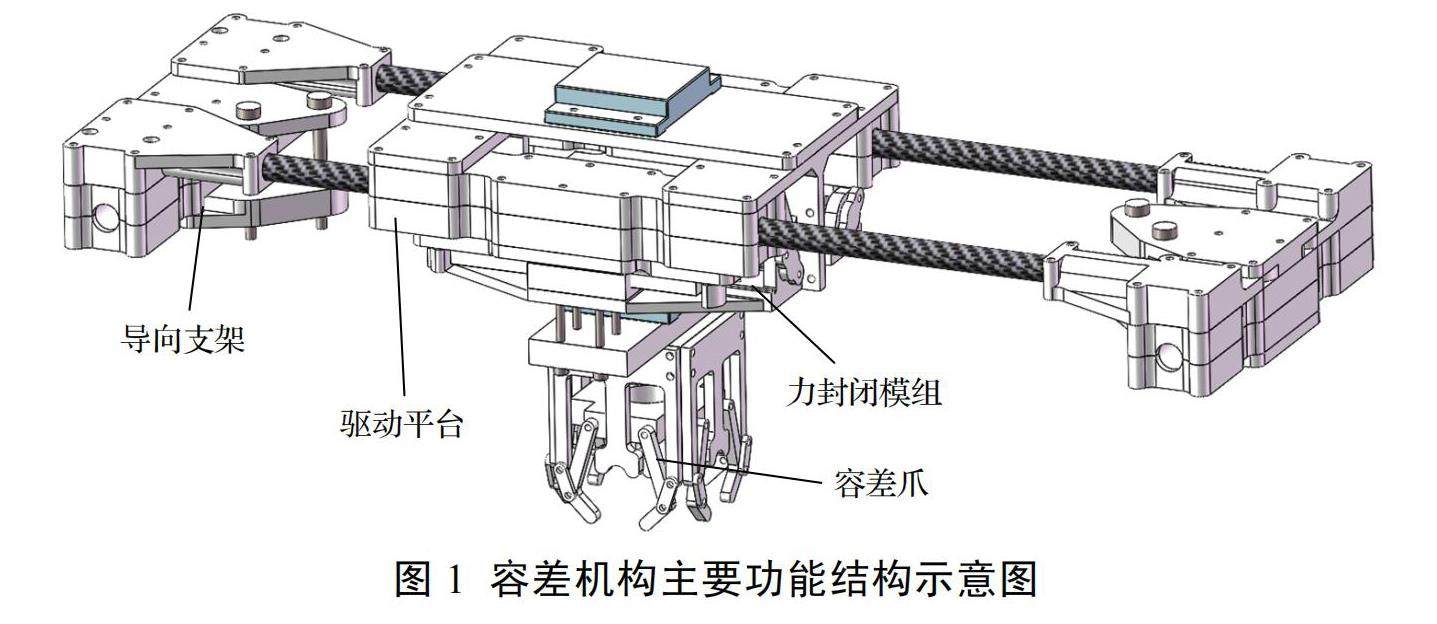
设计与研究 | 高速柔性容差机构抑振研究及其最优驱动设计
设计与研究 | 高速柔性容差机构抑振研究及其最优驱动设计
-

设计与研究 | 折叠舵翼驱动扭杆叠加非线性性能分析
设计与研究 | 折叠舵翼驱动扭杆叠加非线性性能分析
-
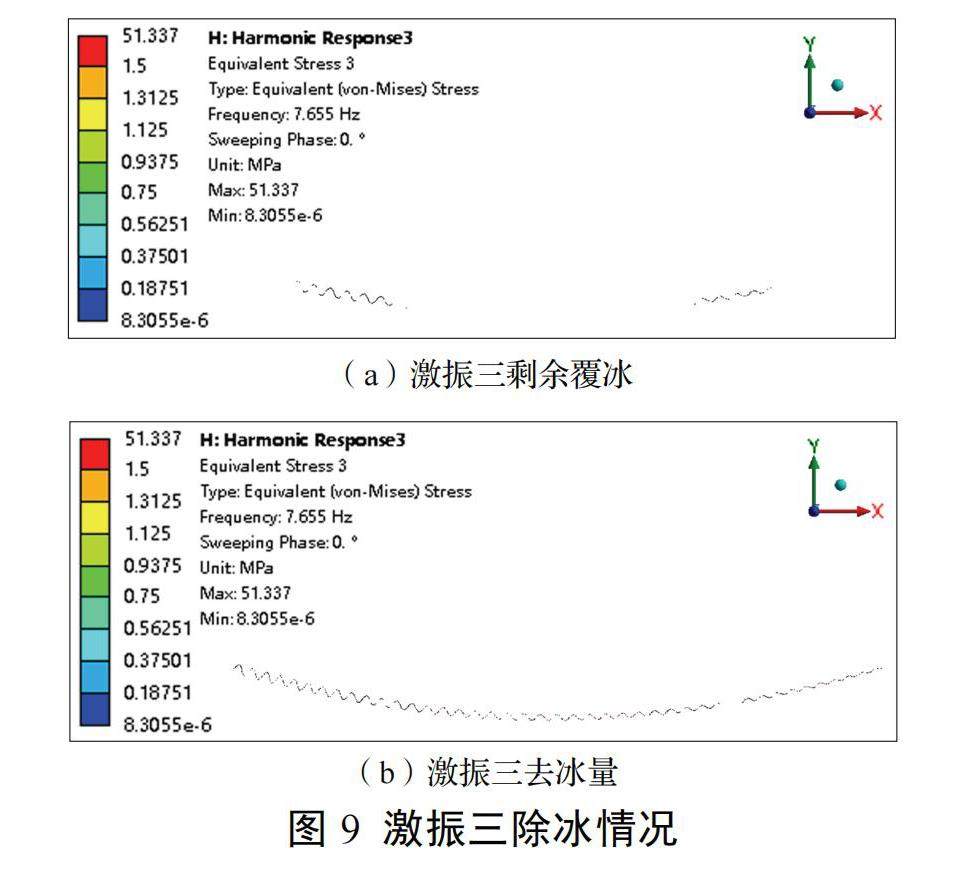
设计与研究 | 架空地线共振除冰仿真分析
设计与研究 | 架空地线共振除冰仿真分析
-
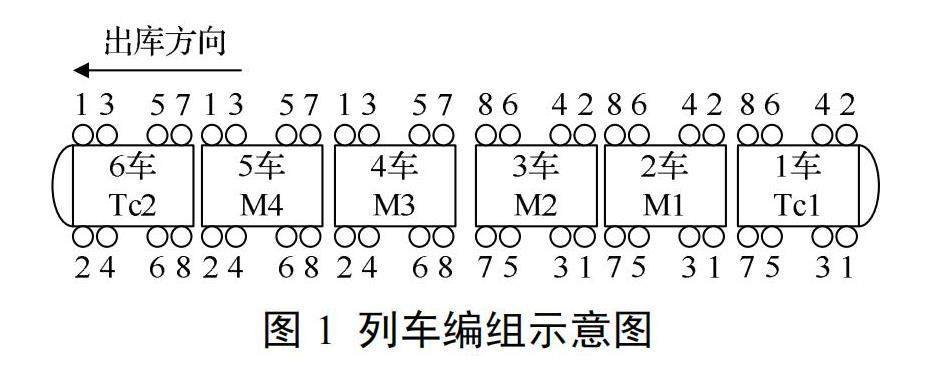
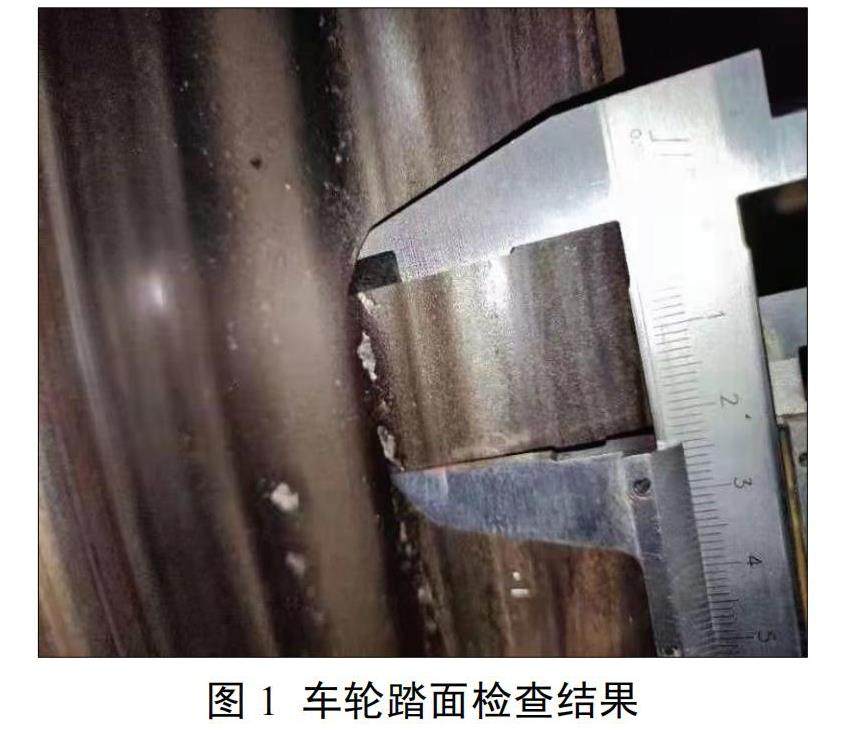
交通工程技术 | 地铁车辆车轮偏磨现象及其原因分析
交通工程技术 | 地铁车辆车轮偏磨现象及其原因分析
-
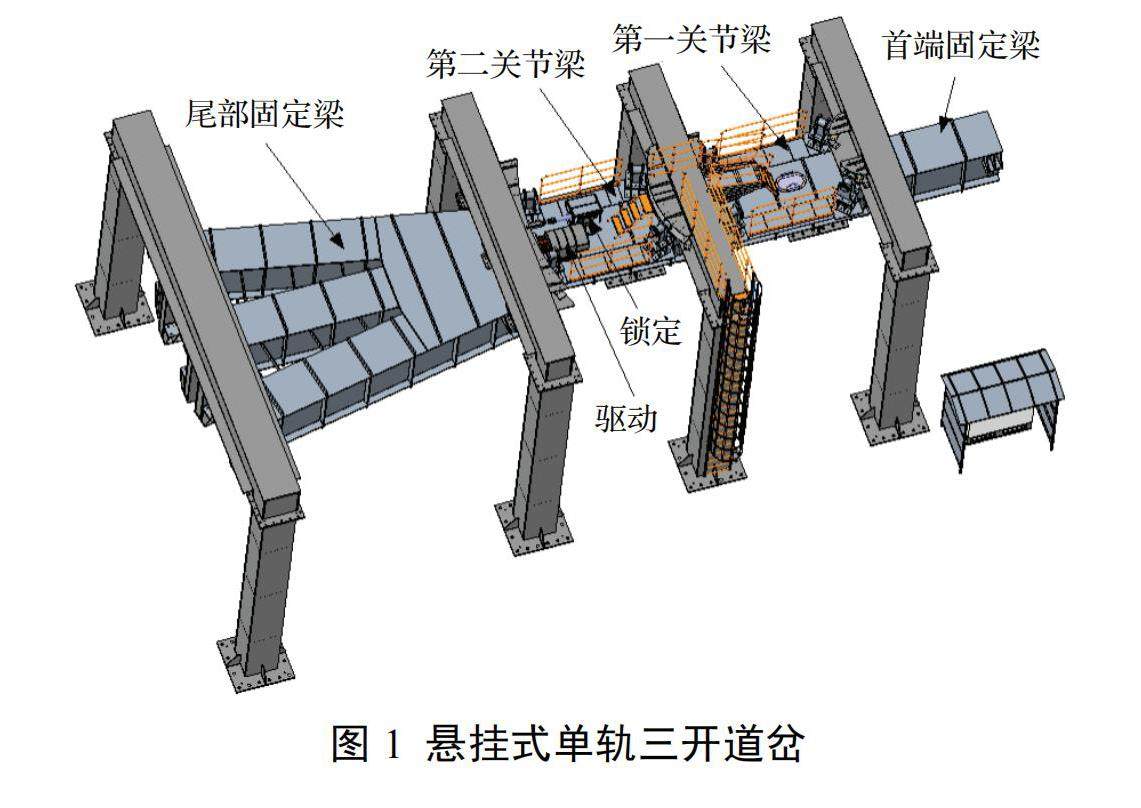
交通工程技术 | 悬挂式单轨三开道岔关键梁体结构研究
交通工程技术 | 悬挂式单轨三开道岔关键梁体结构研究
-
交通工程技术 | 地铁车辆异常抖动分析及监测方法
交通工程技术 | 地铁车辆异常抖动分析及监测方法
-

机器人技术 | 一种管道巡检车的优化设计
机器人技术 | 一种管道巡检车的优化设计
-

机器人技术 | 基于响应面模型和BP-神经网络模型的机器人定位误差及验证分析
机器人技术 | 基于响应面模型和BP-神经网络模型的机器人定位误差及验证分析
-

机器人技术 | 一种自动避障双轮平衡小车的研制
机器人技术 | 一种自动避障双轮平衡小车的研制
-

产品开发与设计 | 一种基于机器视觉的多垃圾自动分类机器设计
产品开发与设计 | 一种基于机器视觉的多垃圾自动分类机器设计
-
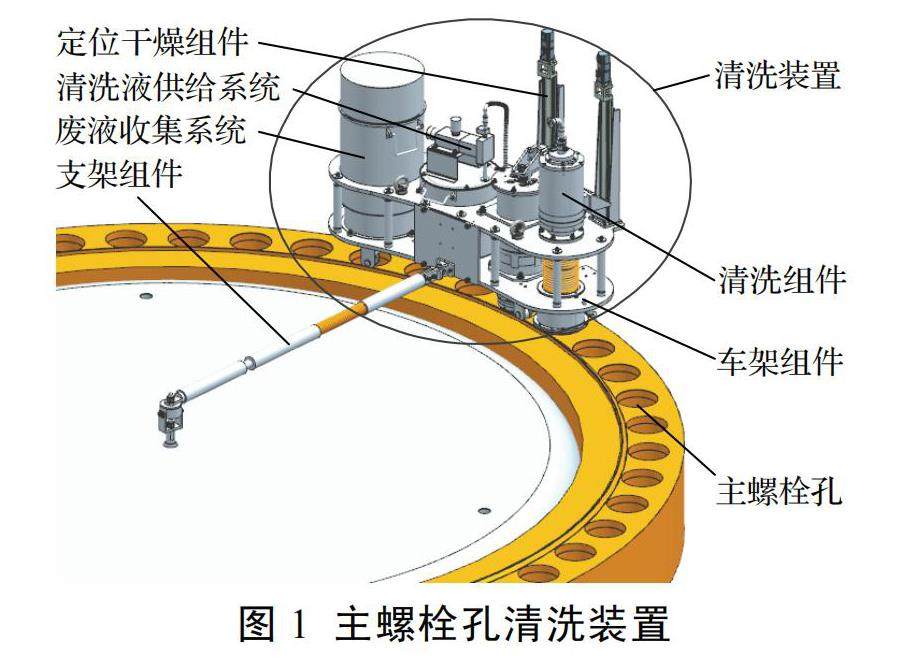
产品开发与设计 | 一种主螺栓孔清洗装置的研制
产品开发与设计 | 一种主螺栓孔清洗装置的研制











 登录
登录