
目录
快速导航-

综述 | 足式机器人足-地力学模型及实验仿真研究综述
综述 | 足式机器人足-地力学模型及实验仿真研究综述
-
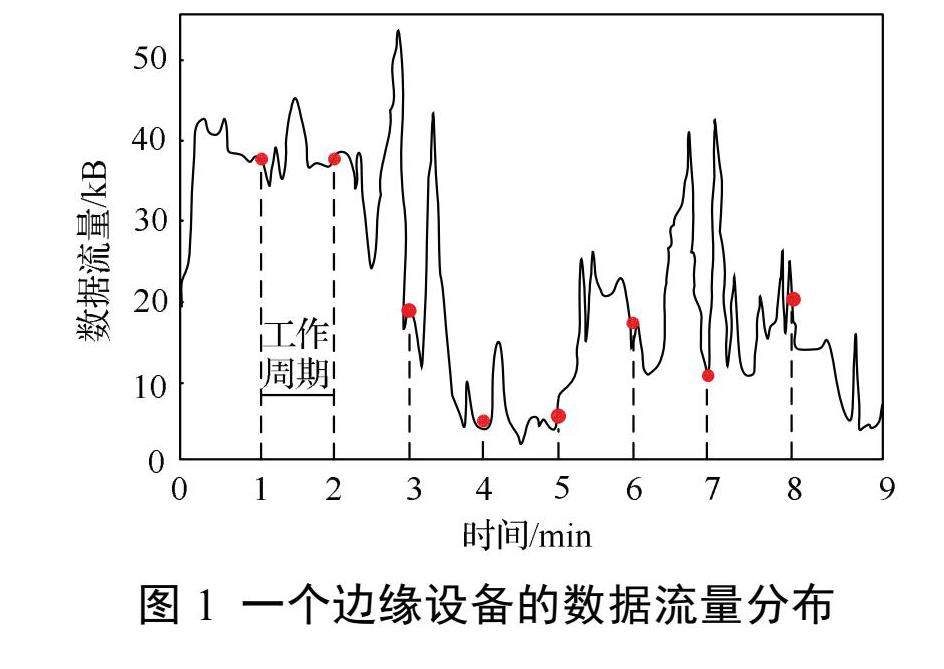
设计与研究 | 一种面向工业互联网安全的边缘设备随机时间轴流量感知模型
设计与研究 | 一种面向工业互联网安全的边缘设备随机时间轴流量感知模型
-
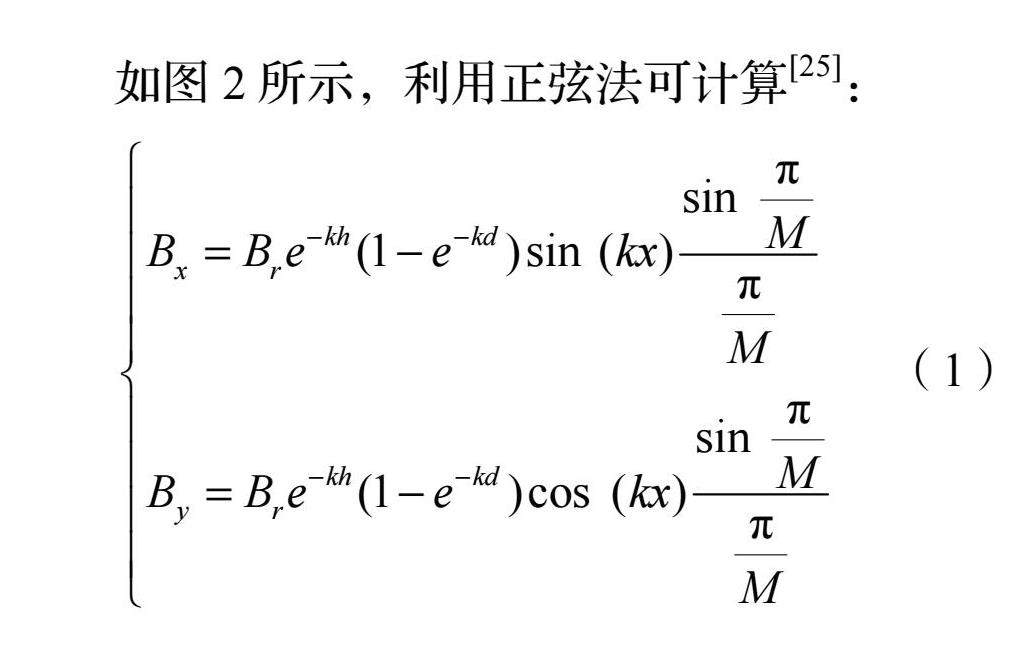
设计与研究 | 基于Halbach阵列的永磁悬浮车辆悬浮系统磁力特性研究
设计与研究 | 基于Halbach阵列的永磁悬浮车辆悬浮系统磁力特性研究
-
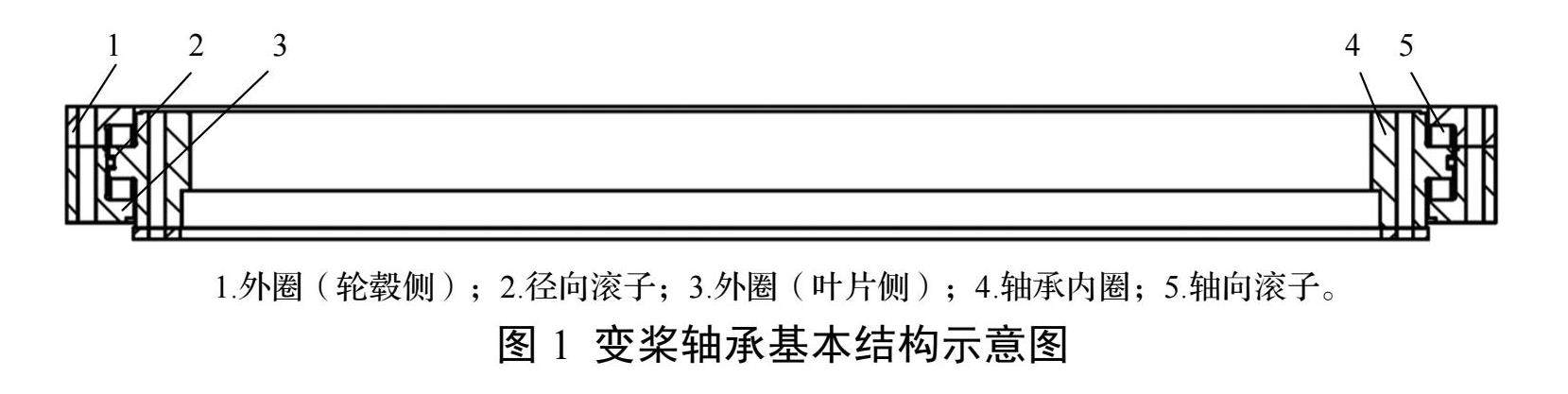
设计与研究 | 螺栓预紧力对风力发电机组变桨轴承强度影响的研究
设计与研究 | 螺栓预紧力对风力发电机组变桨轴承强度影响的研究
-
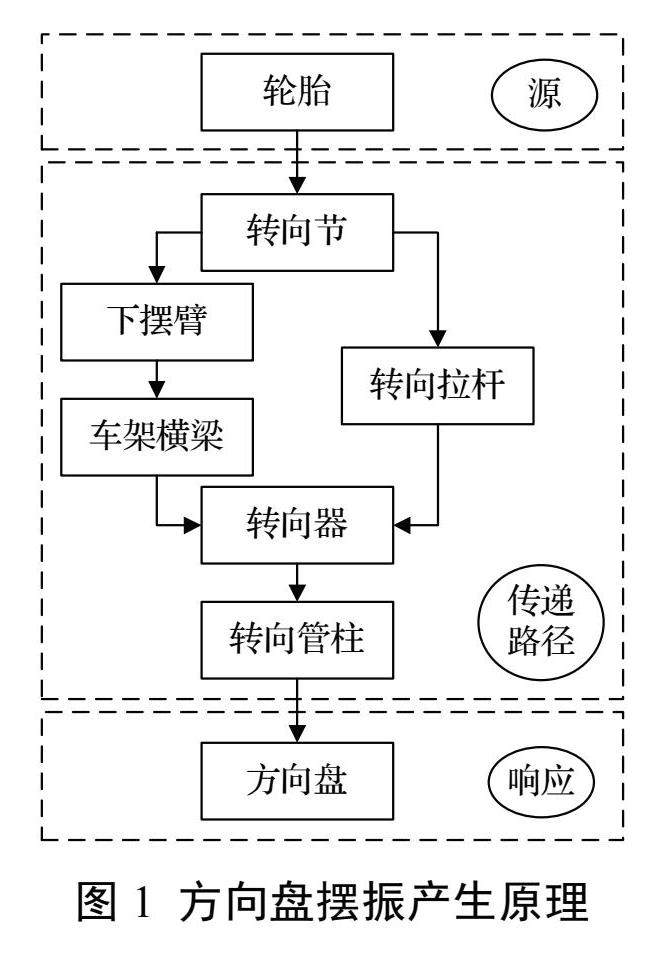
交通工程技术 | 高速行驶方向盘摆振的鲁棒性分析及优化
交通工程技术 | 高速行驶方向盘摆振的鲁棒性分析及优化
-
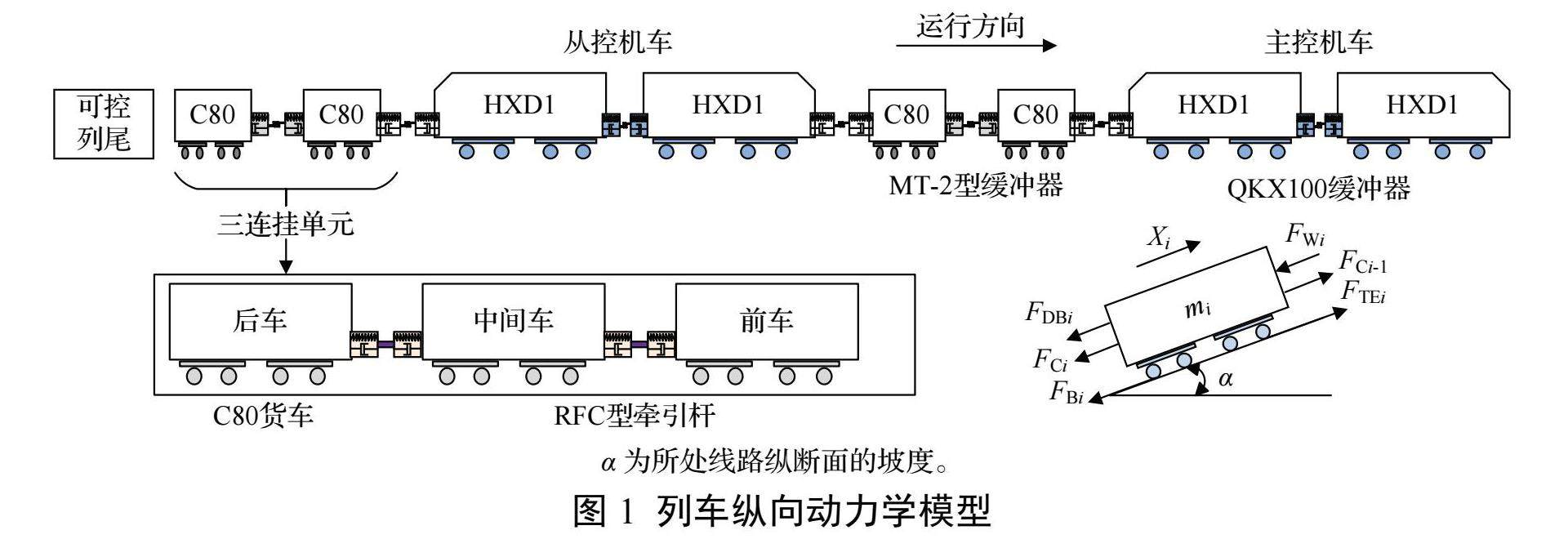
交通工程技术 | 制动操纵对既有2万吨重载列车纵向冲动影响的研究
交通工程技术 | 制动操纵对既有2万吨重载列车纵向冲动影响的研究
-
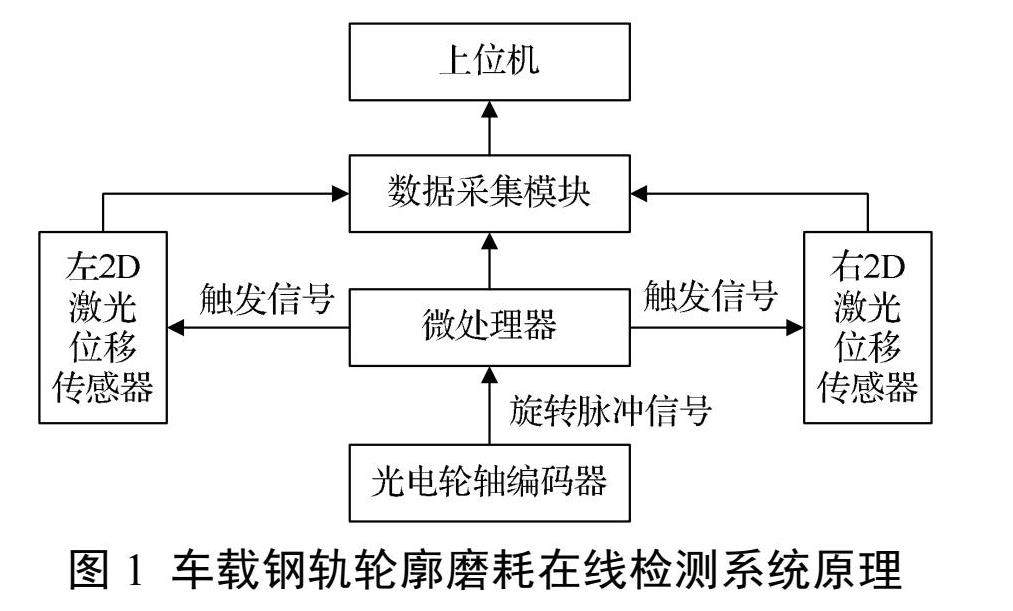
交通工程技术 | 基于随机森林的钢轨轮廓在线识别方法研究
交通工程技术 | 基于随机森林的钢轨轮廓在线识别方法研究
-

产品开发与设计 | 一种全自动石榴剥皮取肉装置的设计
产品开发与设计 | 一种全自动石榴剥皮取肉装置的设计
-
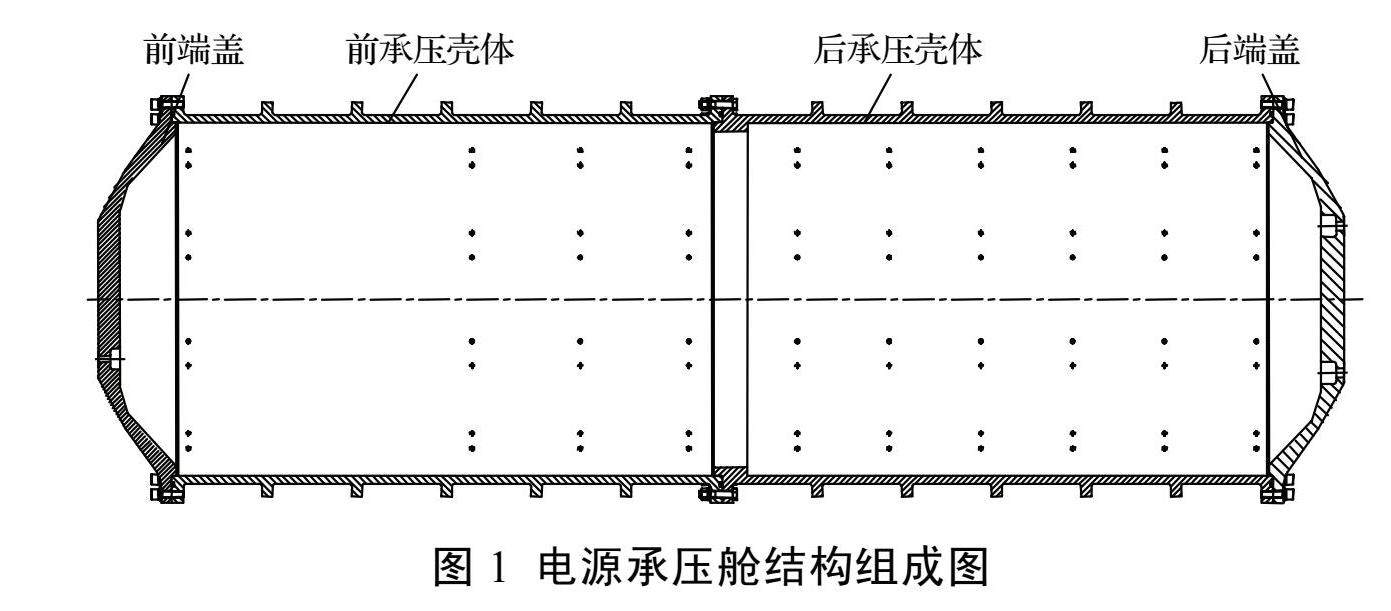
产品开发与设计 | 一种深水大功率电源承压舱的研制
产品开发与设计 | 一种深水大功率电源承压舱的研制
-
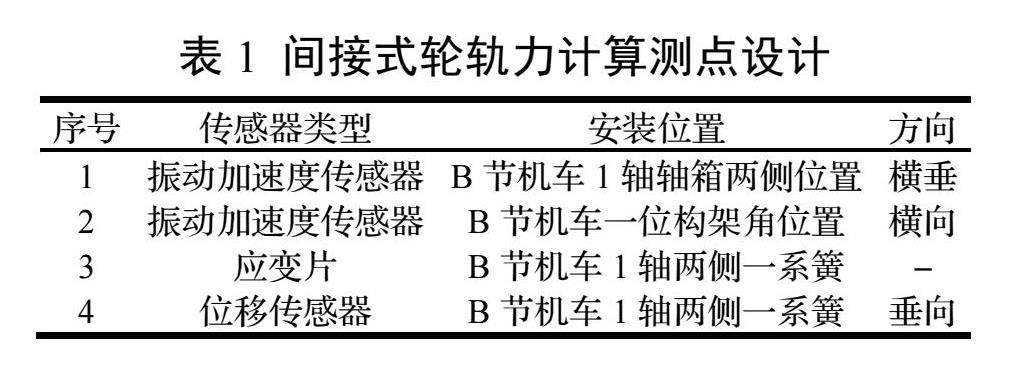
产品开发与设计 | 基于间接式测量轮轨力的重载机车轮轨力智能监测系统研究
产品开发与设计 | 基于间接式测量轮轨力的重载机车轮轨力智能监测系统研究











 登录
登录