

目录
快速导航-

“深部开采覆岩破坏与地压灾害多源信息监测及预警技术”专题 | 非均厚特厚煤层开采高位组合悬臂板结构运动致灾机制
“深部开采覆岩破坏与地压灾害多源信息监测及预警技术”专题 | 非均厚特厚煤层开采高位组合悬臂板结构运动致灾机制
-

“深部开采覆岩破坏与地压灾害多源信息监测及预警技术”专题 | 交叉扇形断顶爆破防治临空回采巷道冲击地压技术
“深部开采覆岩破坏与地压灾害多源信息监测及预警技术”专题 | 交叉扇形断顶爆破防治临空回采巷道冲击地压技术
-

“深部开采覆岩破坏与地压灾害多源信息监测及预警技术”专题 | 急倾斜中厚煤层双斜开采顶板垮落堆积与应力演化特征
“深部开采覆岩破坏与地压灾害多源信息监测及预警技术”专题 | 急倾斜中厚煤层双斜开采顶板垮落堆积与应力演化特征
-

“深部开采覆岩破坏与地压灾害多源信息监测及预警技术”专题 | 采动下淋水软岩巷道围岩变形破坏特征
“深部开采覆岩破坏与地压灾害多源信息监测及预警技术”专题 | 采动下淋水软岩巷道围岩变形破坏特征
-

“深部开采覆岩破坏与地压灾害多源信息监测及预警技术”专题 | 复合坚硬顶板强矿压显现特征及主控层位确定
“深部开采覆岩破坏与地压灾害多源信息监测及预警技术”专题 | 复合坚硬顶板强矿压显现特征及主控层位确定
-

“深部开采覆岩破坏与地压灾害多源信息监测及预警技术”专题 | 上分层遗留区段煤柱下斜交工作面综放开采覆岩结构演化特征
“深部开采覆岩破坏与地压灾害多源信息监测及预警技术”专题 | 上分层遗留区段煤柱下斜交工作面综放开采覆岩结构演化特征
-

“深部开采覆岩破坏与地压灾害多源信息监测及预警技术”专题 | 厚直接顶作用下切顶深度对沿空留巷稳定性影响分析
“深部开采覆岩破坏与地压灾害多源信息监测及预警技术”专题 | 厚直接顶作用下切顶深度对沿空留巷稳定性影响分析
-

“深部开采覆岩破坏与地压灾害多源信息监测及预警技术”专题 | 巨厚煤层分层开采覆岩导水裂隙带高度演化及其预测研究
“深部开采覆岩破坏与地压灾害多源信息监测及预警技术”专题 | 巨厚煤层分层开采覆岩导水裂隙带高度演化及其预测研究
-

“深部开采覆岩破坏与地压灾害多源信息监测及预警技术”专题 | 基于模糊PID的自移式临时支架自适应控制研究
“深部开采覆岩破坏与地压灾害多源信息监测及预警技术”专题 | 基于模糊PID的自移式临时支架自适应控制研究
-

科研成果 | 矿用AI视频边缘计算技术研究与应用
科研成果 | 矿用AI视频边缘计算技术研究与应用
-

科研成果 | 综掘工作面双叶旋流湿式除尘器设计
科研成果 | 综掘工作面双叶旋流湿式除尘器设计
-

综述 | 粉尘浓度监测技术研究现状与发展趋势
综述 | 粉尘浓度监测技术研究现状与发展趋势
-

分析与研究 | 基于超小波变换与OD−ConvNeXt−ELA的矿用滚动轴承故障诊断
分析与研究 | 基于超小波变换与OD−ConvNeXt−ELA的矿用滚动轴承故障诊断
-
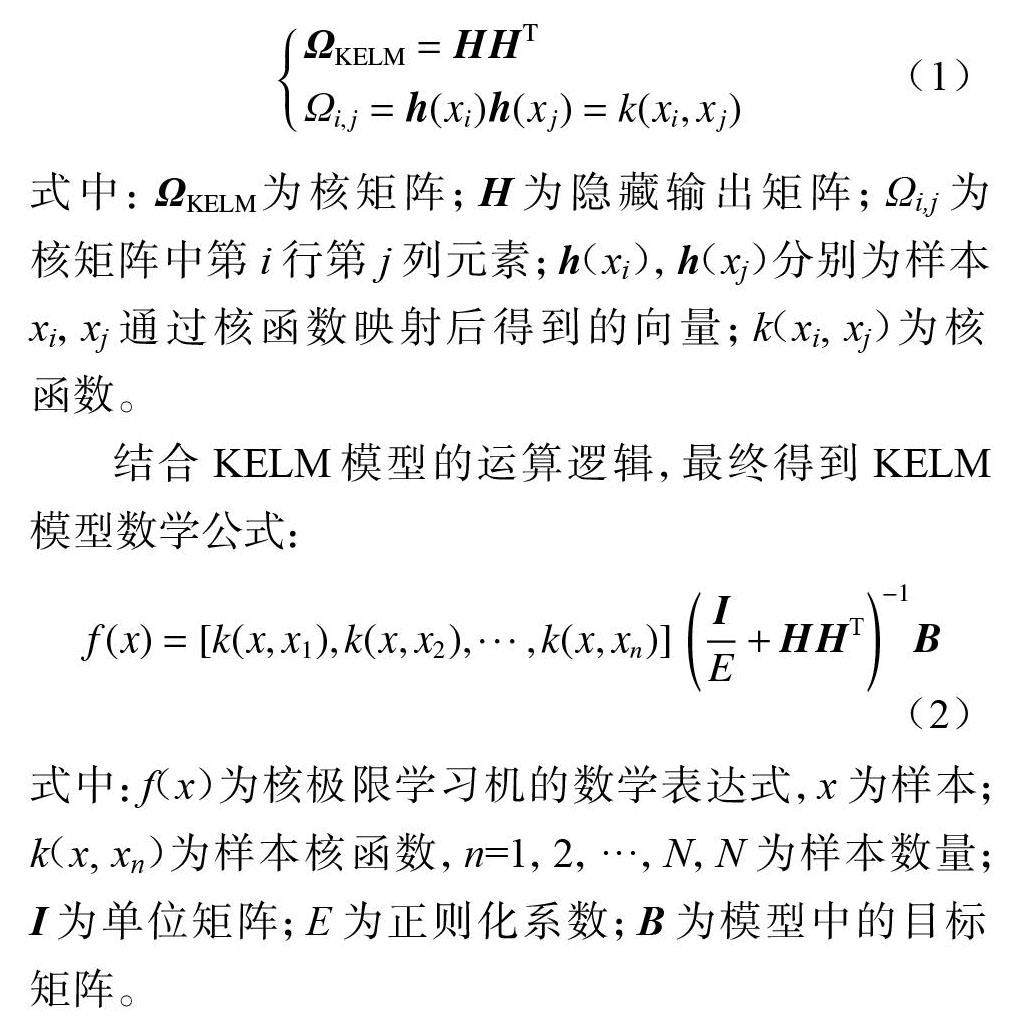
分析与研究 | 基于ACO−KELM的采空区遗煤温度预测模型研究
分析与研究 | 基于ACO−KELM的采空区遗煤温度预测模型研究
-

分析与研究 | 基于特征选择与BO−GBDT 的工作面瓦斯涌出量预测方法
分析与研究 | 基于特征选择与BO−GBDT 的工作面瓦斯涌出量预测方法
-

分析与研究 | 煤矿救援机器人路径规划研究 朱洪波
分析与研究 | 煤矿救援机器人路径规划研究 朱洪波
-

分析与研究 | 基于AIWCPSO算法的喷浆机械臂运动轨迹优化
分析与研究 | 基于AIWCPSO算法的喷浆机械臂运动轨迹优化
-

分析与研究 | 基于深度学习的输送带跑偏状态智能监测方法
分析与研究 | 基于深度学习的输送带跑偏状态智能监测方法
-

分析与研究 | 一种煤矿井下多目标检测算法
分析与研究 | 一种煤矿井下多目标检测算法
-
分析与研究 | 《工矿自动化》杂志2024年总目次
分析与研究 | 《工矿自动化》杂志2024年总目次













 登录
登录