

目录
快速导航-
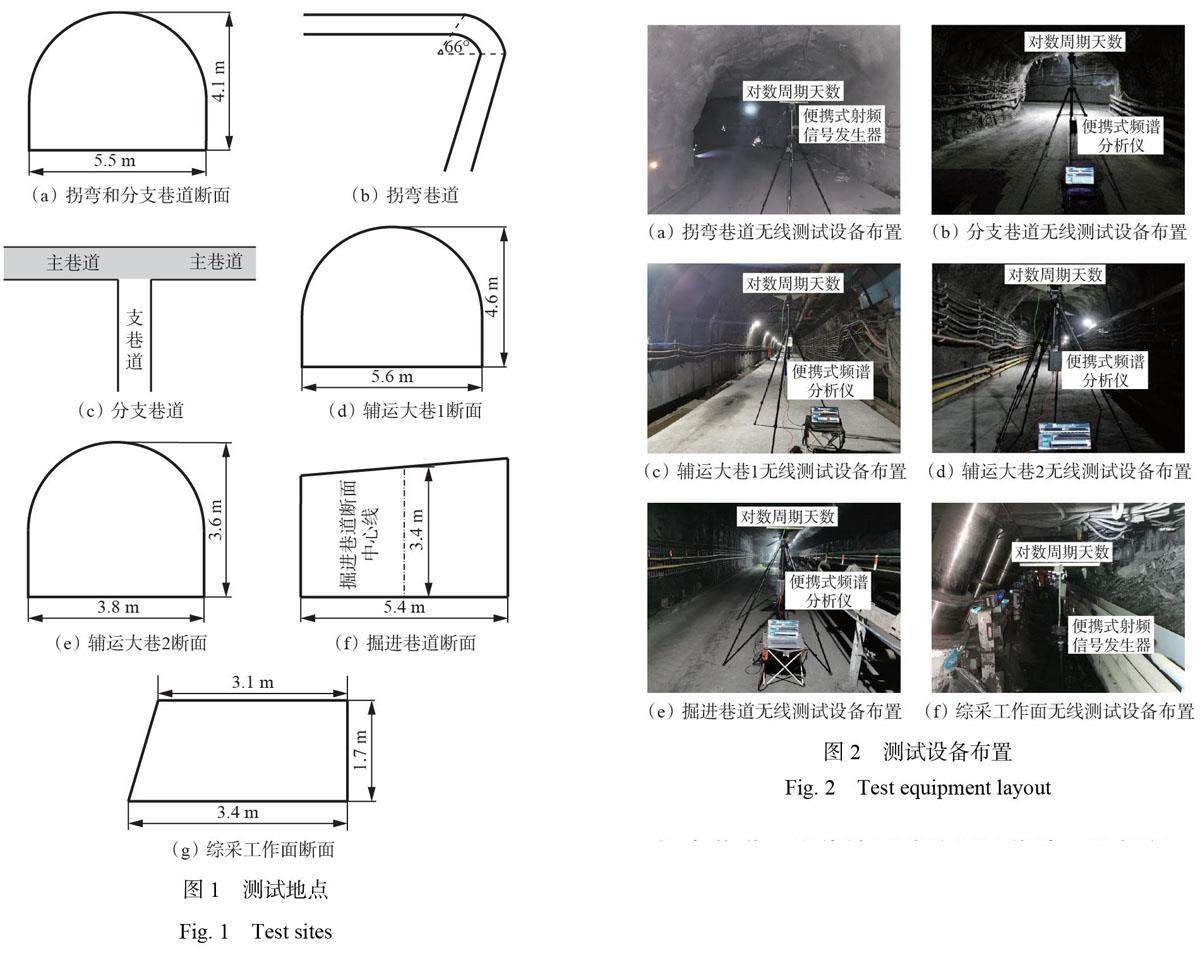
科研成果 | 矿井无线传输测试分析与矿用5G优选工作频段研究
科研成果 | 矿井无线传输测试分析与矿用5G优选工作频段研究
-
“矿山无人驾驶技术”专题 | 融合简化可视图和A*算法的矿用车辆全局路径规划算法
“矿山无人驾驶技术”专题 | 融合简化可视图和A*算法的矿用车辆全局路径规划算法
-
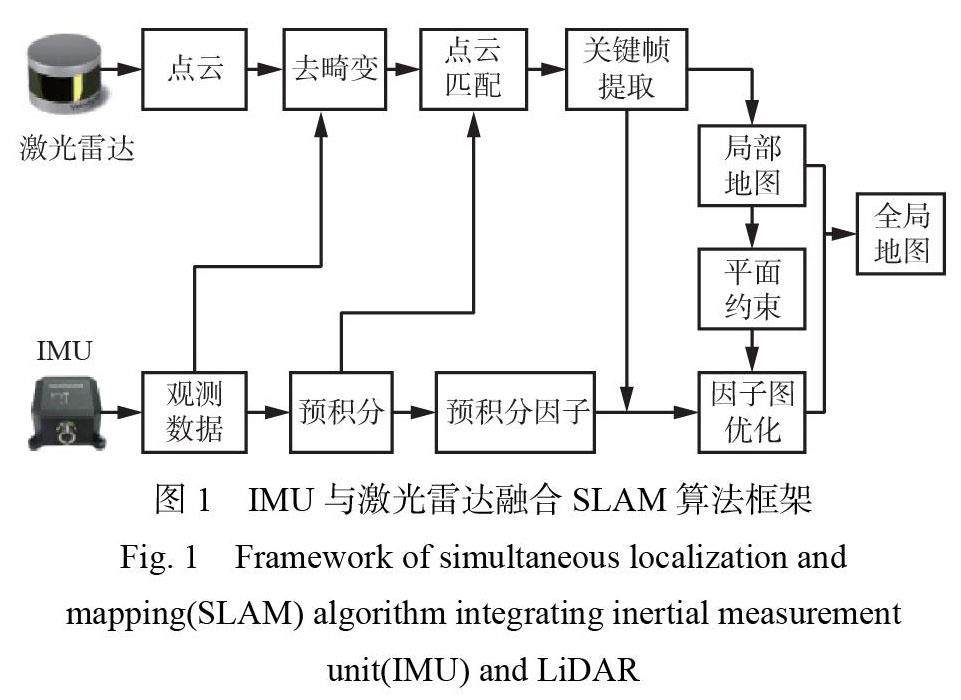
“矿山无人驾驶技术”专题 | 面向矿井无人驾驶的IMU与激光雷达融合SLAM技术
“矿山无人驾驶技术”专题 | 面向矿井无人驾驶的IMU与激光雷达融合SLAM技术
-
“矿山无人驾驶技术”专题 | 矿用无人驾驶车辆行人检测技术研究
“矿山无人驾驶技术”专题 | 矿用无人驾驶车辆行人检测技术研究
-

“矿山无人驾驶技术”专题 | SLAM技术及其在矿山无人驾驶领域的研究现状与发展趋势
“矿山无人驾驶技术”专题 | SLAM技术及其在矿山无人驾驶领域的研究现状与发展趋势
-

“矿山无人驾驶技术”专题 | 矿用激光雷达与相机的无目标自动标定方法研究
“矿山无人驾驶技术”专题 | 矿用激光雷达与相机的无目标自动标定方法研究
-
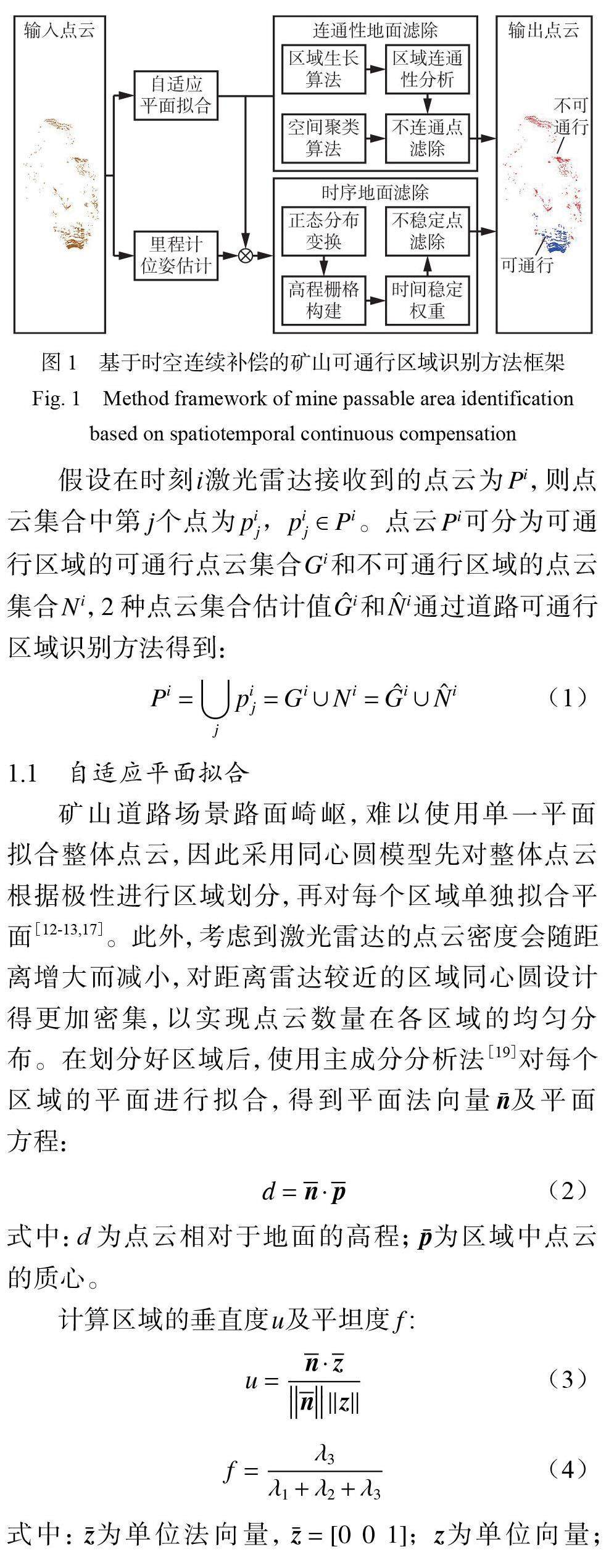
“矿山无人驾驶技术”专题 | 基于时空连续补偿的矿山可通行区域识别方法
“矿山无人驾驶技术”专题 | 基于时空连续补偿的矿山可通行区域识别方法
-
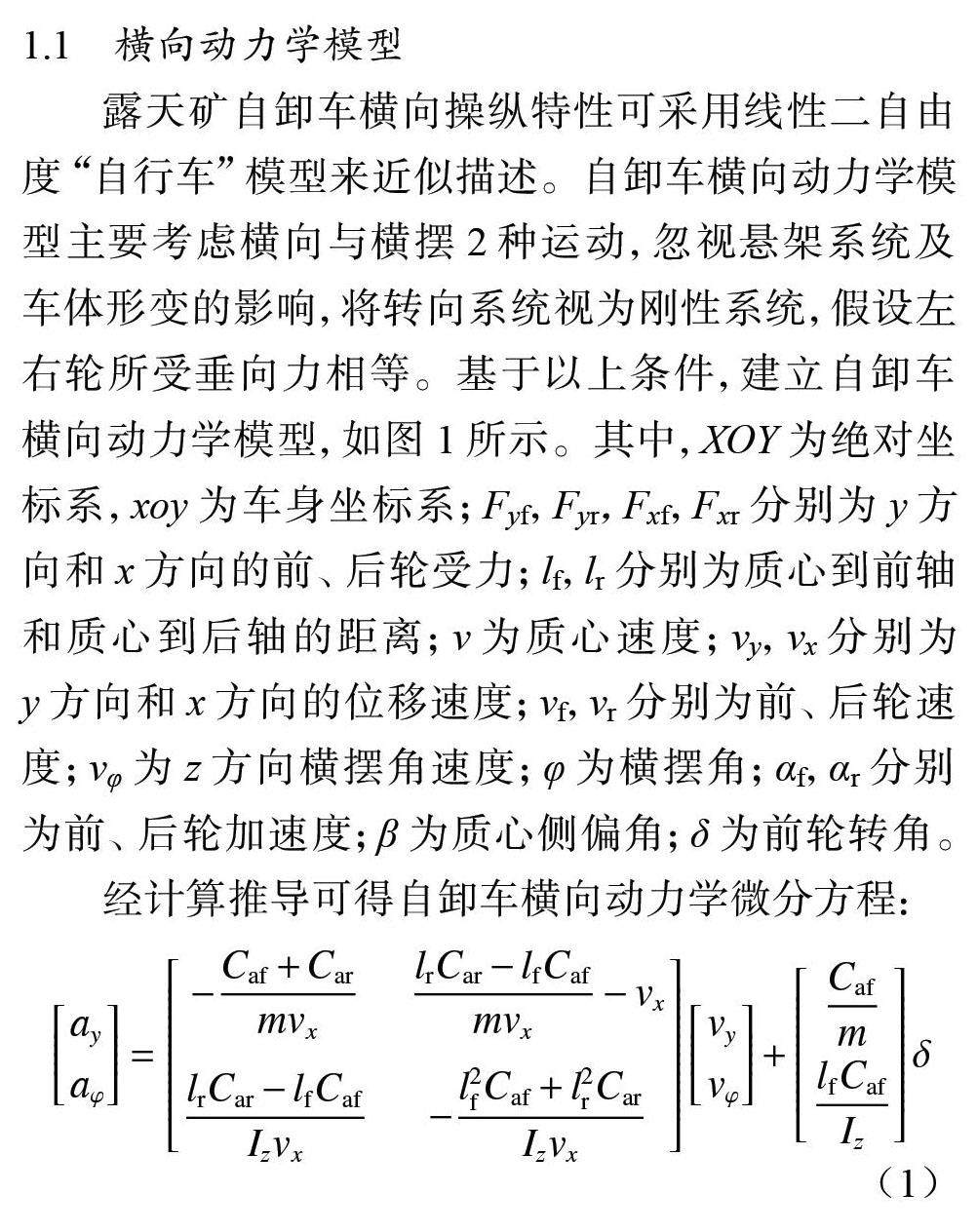
“矿山无人驾驶技术”专题 | 露天矿无人驾驶自卸车横−纵向协同控制研究
“矿山无人驾驶技术”专题 | 露天矿无人驾驶自卸车横−纵向协同控制研究
-
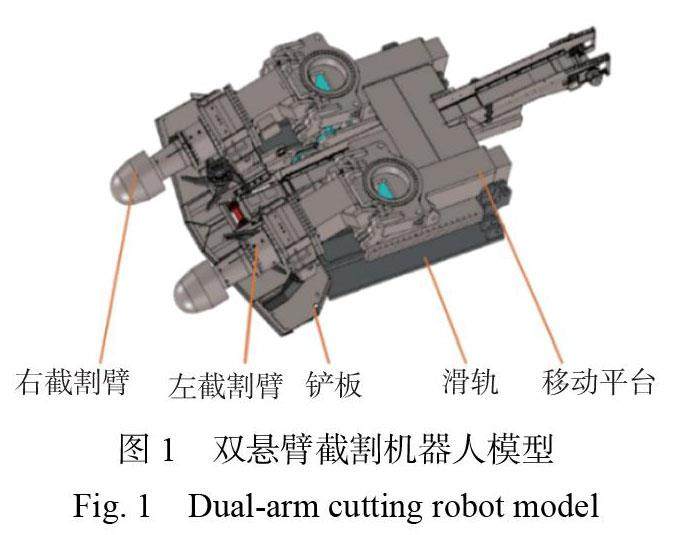
分析与研究 | 双悬臂截割机器人相对动力学建模与力位混合控制研究
分析与研究 | 双悬臂截割机器人相对动力学建模与力位混合控制研究
-
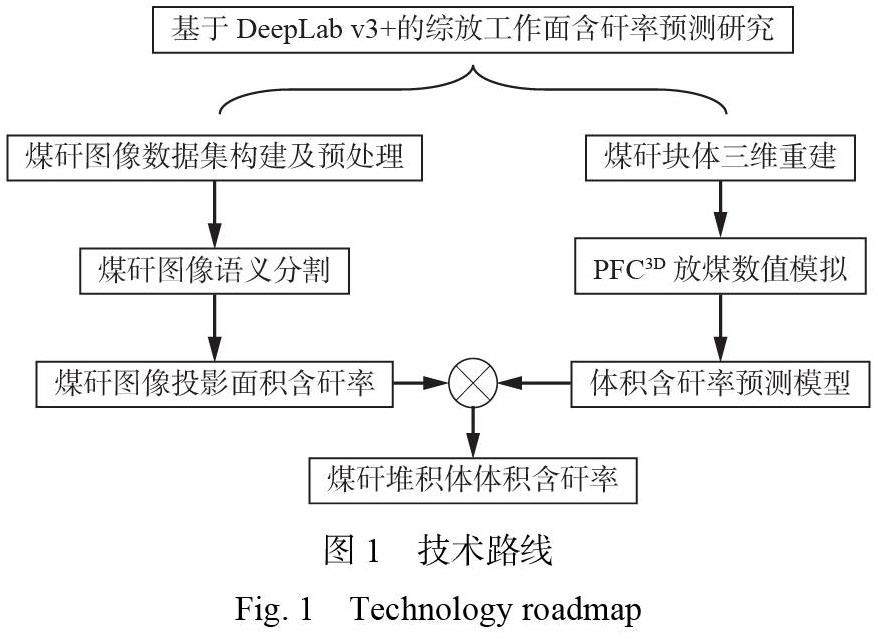
分析与研究 | 基于DeepLab v3+的综放工作面含矸率预测研究
分析与研究 | 基于DeepLab v3+的综放工作面含矸率预测研究
-
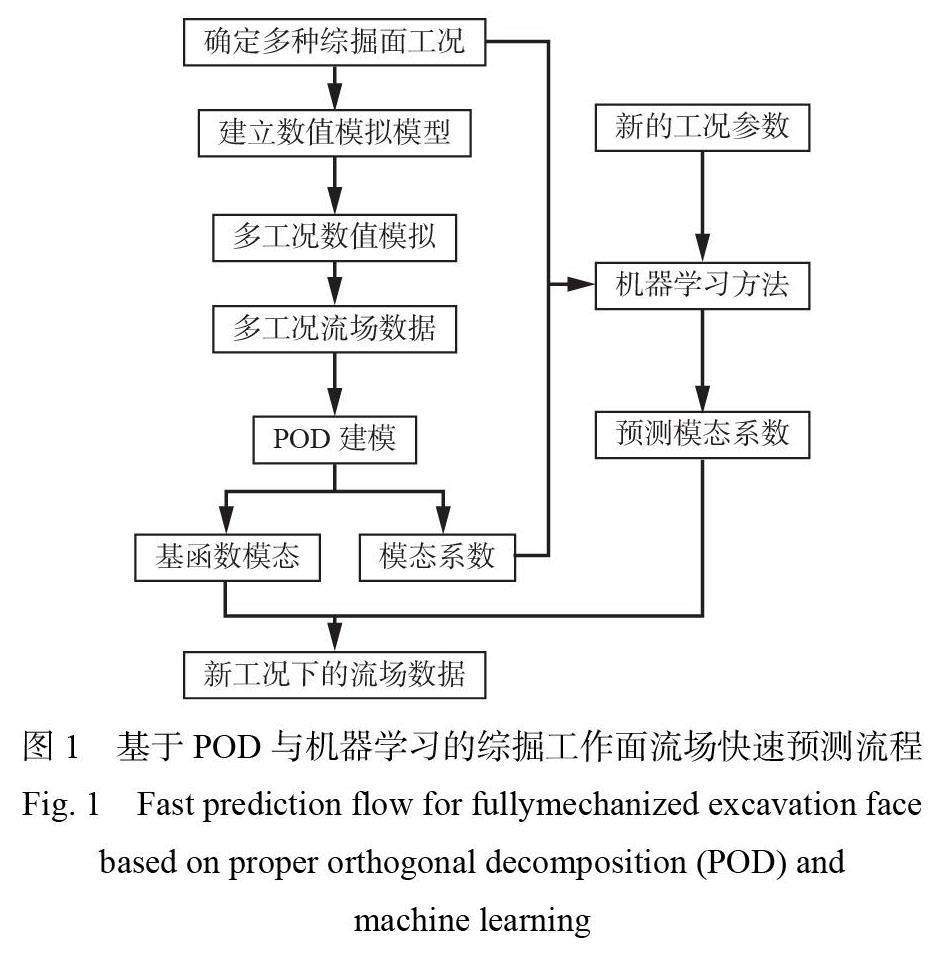
分析与研究 | 基于POD与机器学习的综掘工作面流场快速预测算法
分析与研究 | 基于POD与机器学习的综掘工作面流场快速预测算法
-
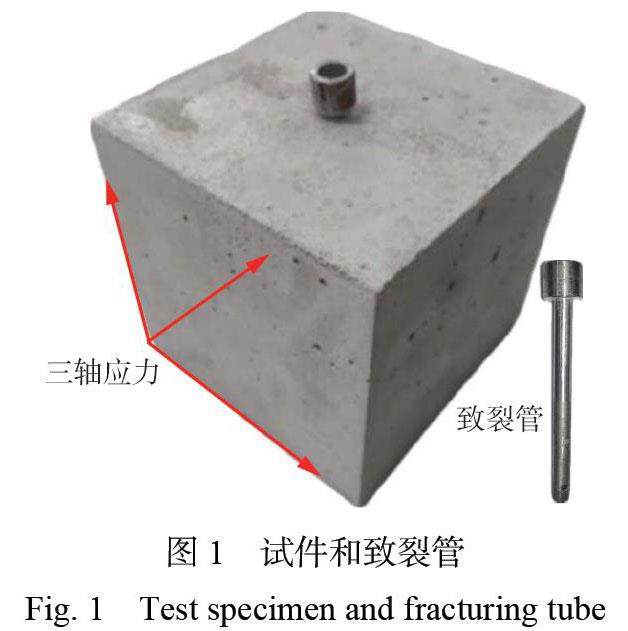
分析与研究 | 高压气体致裂煤岩孔壁应变响应特征研究
分析与研究 | 高压气体致裂煤岩孔壁应变响应特征研究
-
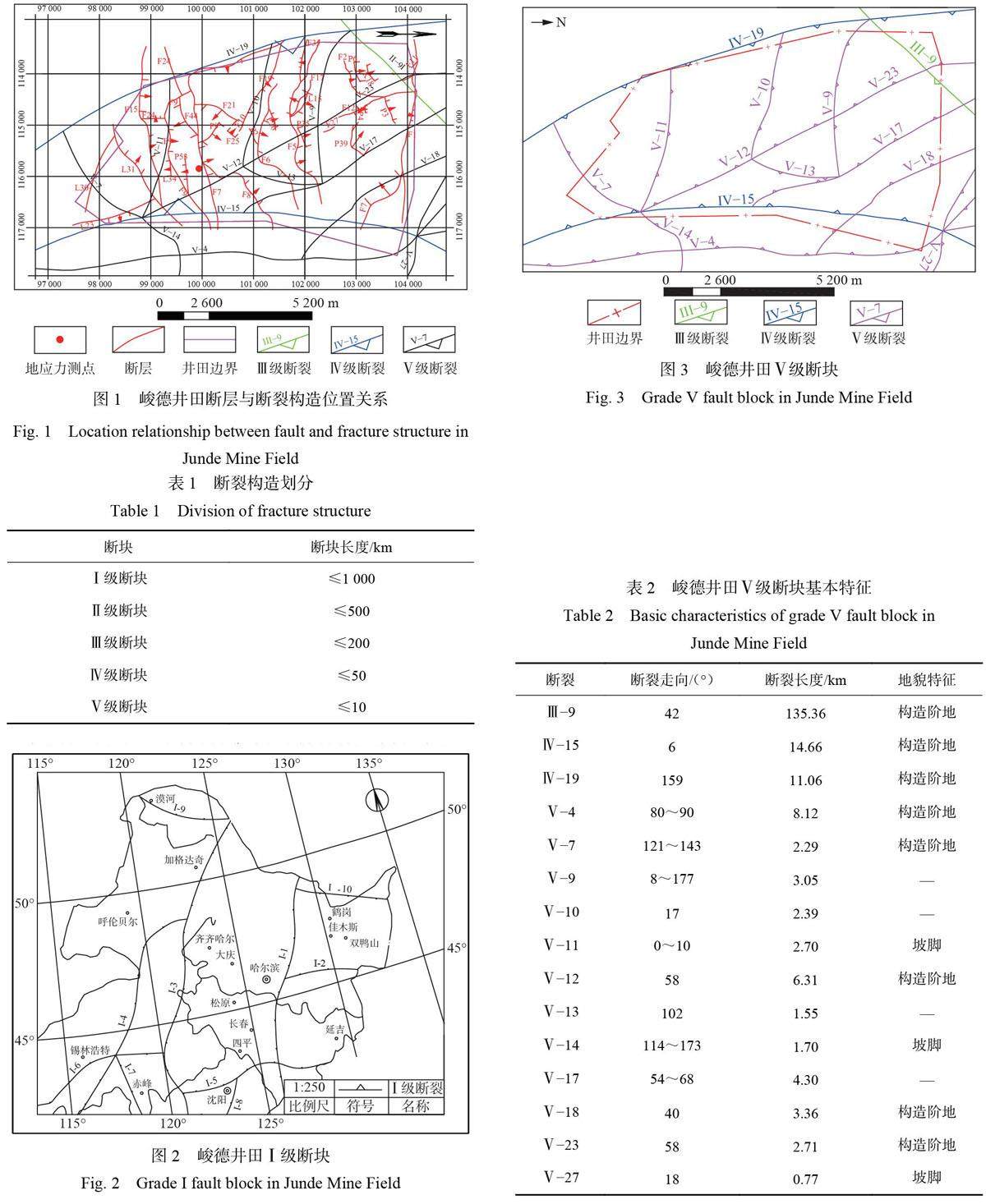
分析与研究 | 矿井断裂构造分形特征及其对冲击地压影响的研究
分析与研究 | 矿井断裂构造分形特征及其对冲击地压影响的研究
-
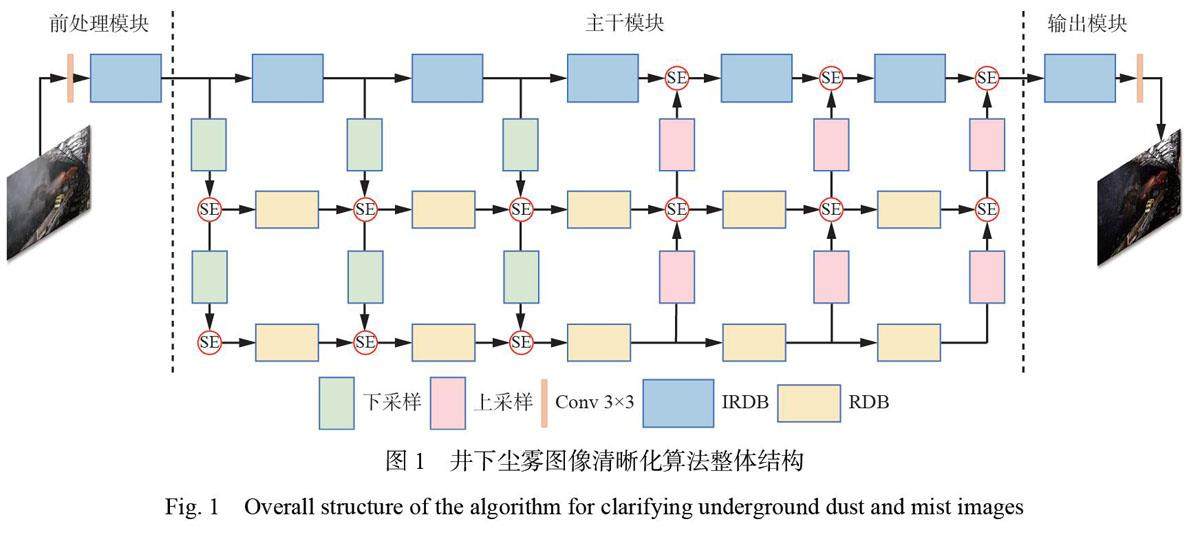
分析与研究 | 基于增强网格网络的井下尘雾图像清晰化算法
分析与研究 | 基于增强网格网络的井下尘雾图像清晰化算法
-
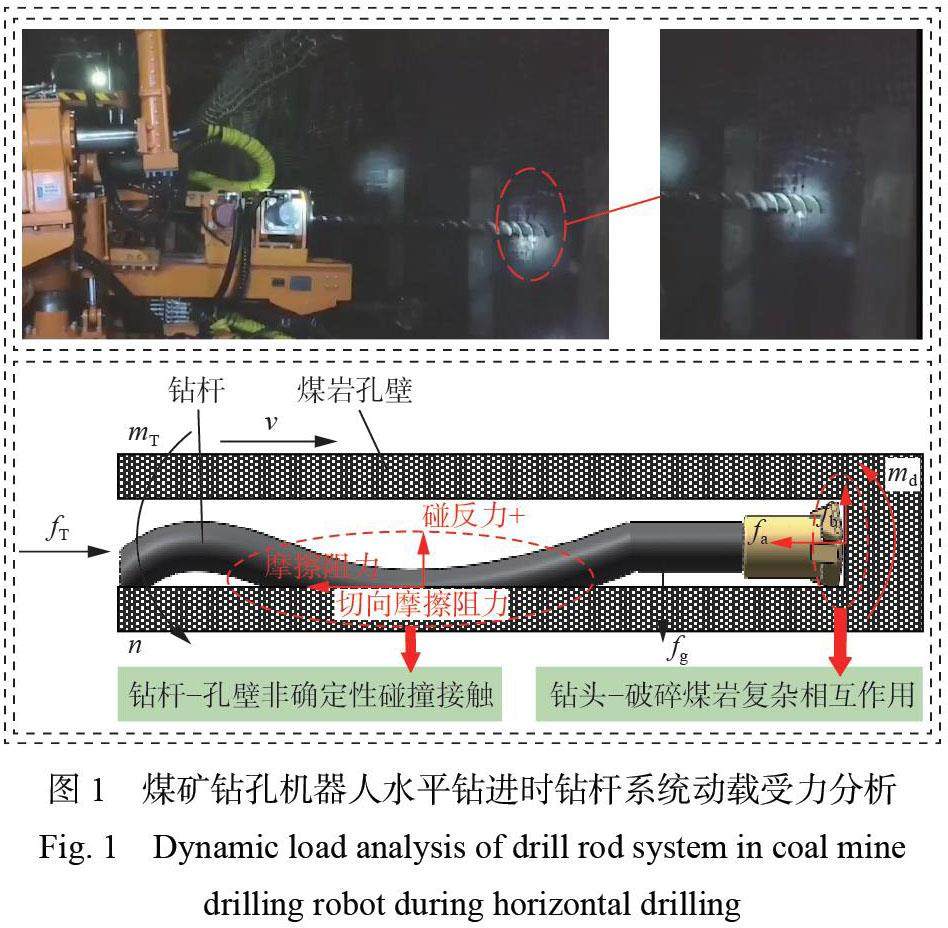
分析与研究 | 软硬交错倾斜煤层下煤矿钻孔机器人钻杆系统振动特性研究
分析与研究 | 软硬交错倾斜煤层下煤矿钻孔机器人钻杆系统振动特性研究
-
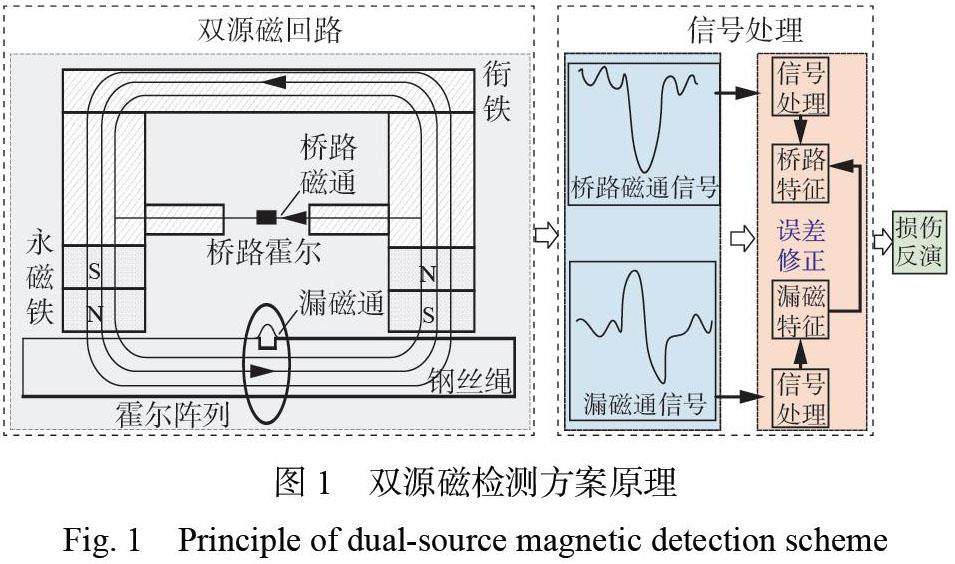
分析与研究 | 矿用钢丝绳双源磁回路结构设计与仿真分析
分析与研究 | 矿用钢丝绳双源磁回路结构设计与仿真分析
-
分析与研究 | 基于Dijkstra−ACO混合算法的煤矿井下应急逃生路径动态规划
分析与研究 | 基于Dijkstra−ACO混合算法的煤矿井下应急逃生路径动态规划
-
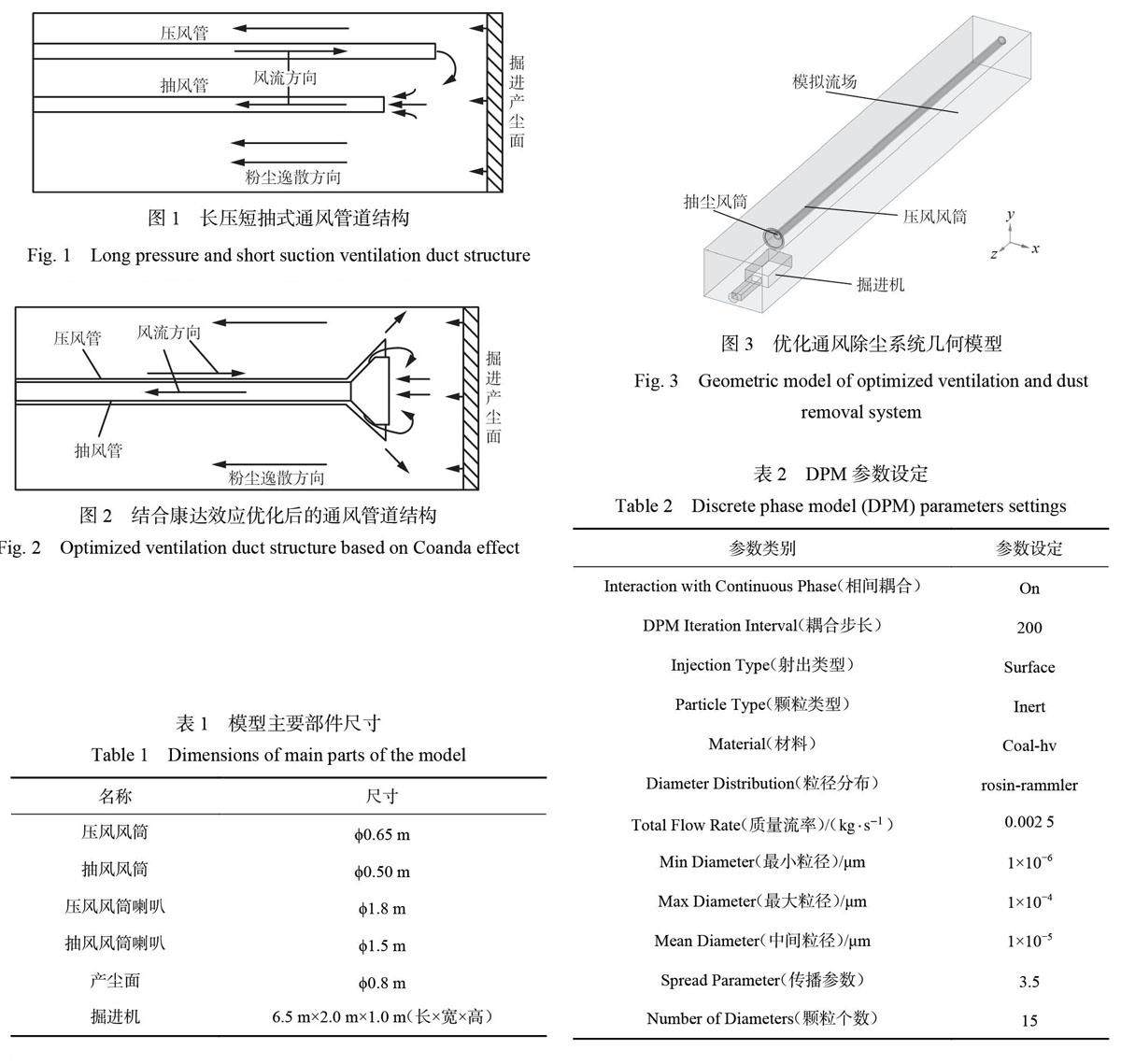
分析与研究 | 综掘工作面通风除尘系统结构优化及参数智能调控
分析与研究 | 综掘工作面通风除尘系统结构优化及参数智能调控
-
分析与研究 | 综掘工作面气幕控尘参数对粉尘污染的影响
分析与研究 | 综掘工作面气幕控尘参数对粉尘污染的影响
-

分析与研究 | 通风扰动下连采工作面截割粉尘运移及分布规律
分析与研究 | 通风扰动下连采工作面截割粉尘运移及分布规律













 登录
登录