
目录
快速导航-
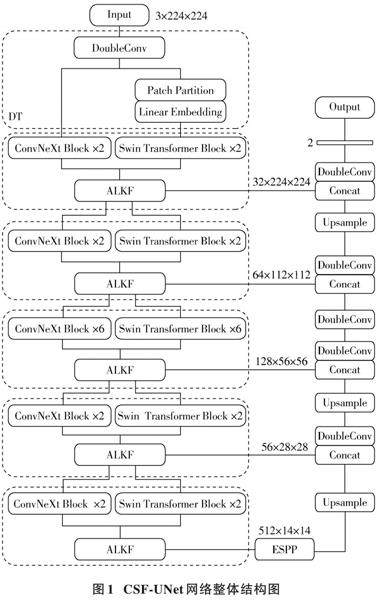
信号分析与图像处理 | 基于双流特征融合的肺结节图像分割网络
信号分析与图像处理 | 基于双流特征融合的肺结节图像分割网络
-
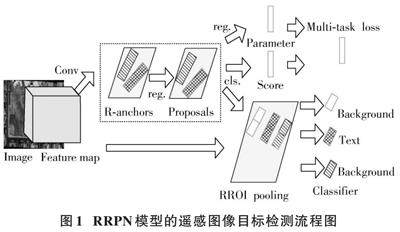
信号分析与图像处理 | 改进RRPN模型的遥感图像目标检测
信号分析与图像处理 | 改进RRPN模型的遥感图像目标检测
-
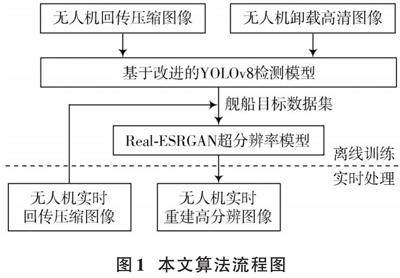
信号分析与图像处理 | 无人机海上舰船目标影像超分辨率重建
信号分析与图像处理 | 无人机海上舰船目标影像超分辨率重建
-
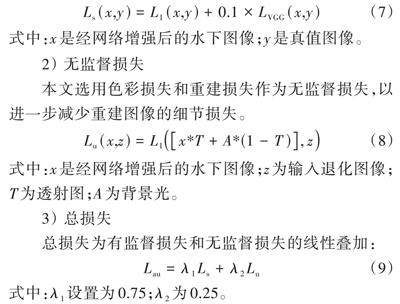
信号分析与图像处理 | 基于细节增强和多颜色空间学习的联合监督水下图像增强算法
信号分析与图像处理 | 基于细节增强和多颜色空间学习的联合监督水下图像增强算法
-

信号分析与图像处理 | 基于双目立体视觉的多分辨率图像匹配方法研究
信号分析与图像处理 | 基于双目立体视觉的多分辨率图像匹配方法研究
-
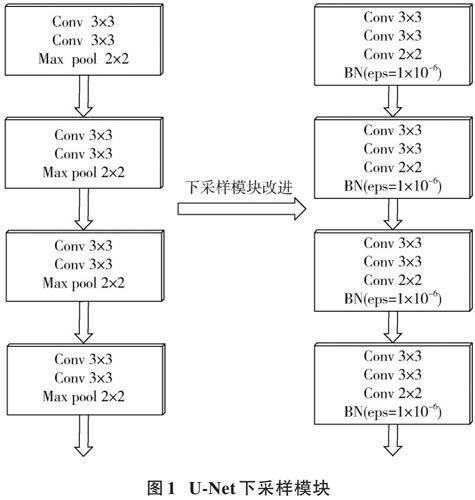
信号分析与图像处理 | UMTransNet:结合U⁃Net和多尺度感知Transformer的图像拼接定位方法
信号分析与图像处理 | UMTransNet:结合U⁃Net和多尺度感知Transformer的图像拼接定位方法
-
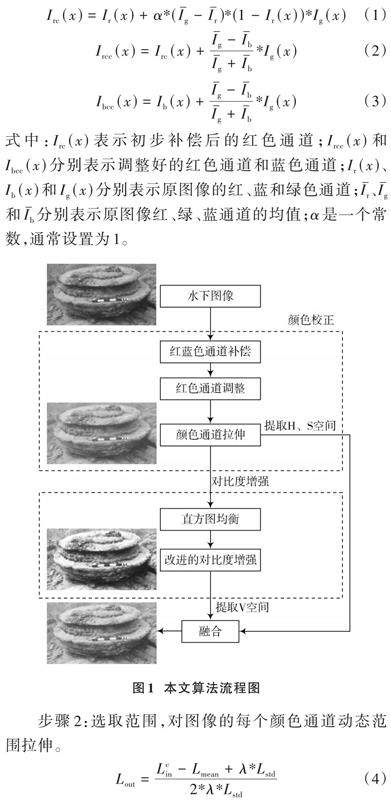
信号分析与图像处理 | 基于颜色校正与改进的对比度增强的水下图像增强方法
信号分析与图像处理 | 基于颜色校正与改进的对比度增强的水下图像增强方法
-
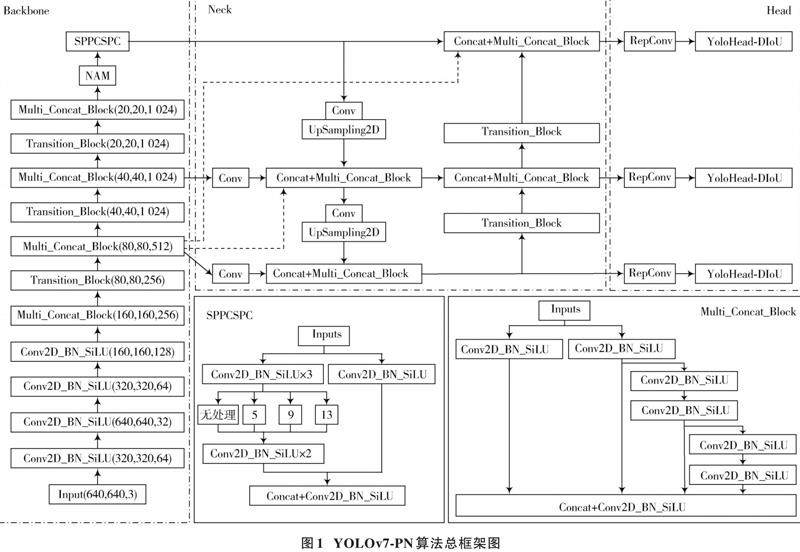
信号分析与图像处理 | 基于改进YOLOv7的微生物细胞识别算法
信号分析与图像处理 | 基于改进YOLOv7的微生物细胞识别算法
-
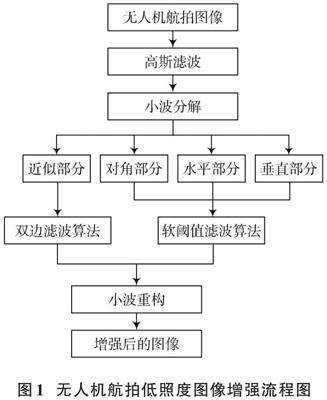
信号分析与图像处理 | 光照不均匀条件下无人机航拍低照度图像增强方法
信号分析与图像处理 | 光照不均匀条件下无人机航拍低照度图像增强方法
-
信号分析与图像处理 | 改进暗通道原理下视觉图像光晕消除算法
信号分析与图像处理 | 改进暗通道原理下视觉图像光晕消除算法
-
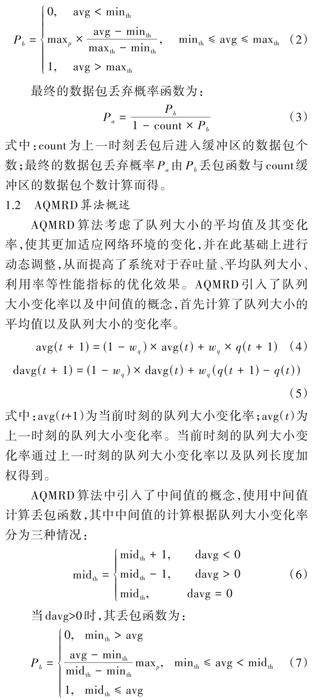
网络与信息安全 | Huber⁃AQMRD算法:应对网络拥塞的性能改进
网络与信息安全 | Huber⁃AQMRD算法:应对网络拥塞的性能改进
-
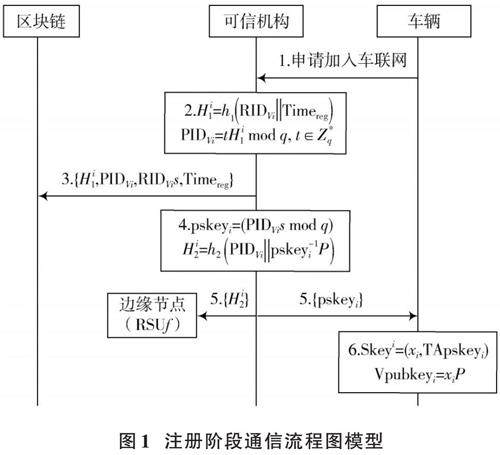
网络与信息安全 | 基于区块链的车联网跨域数据安全传输系统设计
网络与信息安全 | 基于区块链的车联网跨域数据安全传输系统设计
-

网络与信息安全 | 基于注意力循环神经网络的联合深度推荐模型
网络与信息安全 | 基于注意力循环神经网络的联合深度推荐模型
-
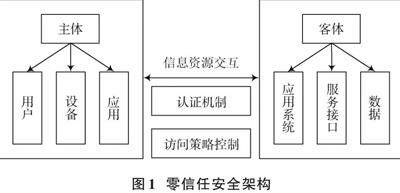
网络与信息安全 | 零信任环境下的多层次身份认证数据流安全检测算法
网络与信息安全 | 零信任环境下的多层次身份认证数据流安全检测算法
-
网络与信息安全 | 面向工业物联网的策略隐藏属性基加密方案
网络与信息安全 | 面向工业物联网的策略隐藏属性基加密方案
-
网络与信息安全 | 基于知识图谱技术的计算机网络链路漏洞检测研究
网络与信息安全 | 基于知识图谱技术的计算机网络链路漏洞检测研究
-
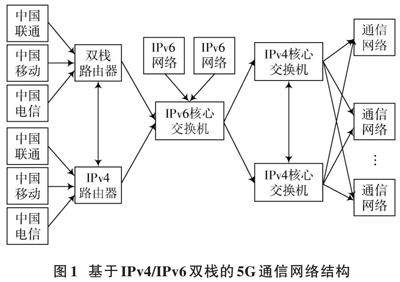
通信与信息工程 | 支持IPv4/IPv6双栈的5G通信网络可靠性组网部署研究
通信与信息工程 | 支持IPv4/IPv6双栈的5G通信网络可靠性组网部署研究
-
通信与信息工程 | 水下舰艇扩频通信体制研究
通信与信息工程 | 水下舰艇扩频通信体制研究
-
通信与信息工程 | 微带交指带通滤波器小型化结构设计
通信与信息工程 | 微带交指带通滤波器小型化结构设计
-

能源与环境科学 | 基于改进人工势场法的避障路径规划研究
能源与环境科学 | 基于改进人工势场法的避障路径规划研究
-
测控与自动化技术 | 基于改进YOLOv5的复杂场景电动车头盔检测方法
测控与自动化技术 | 基于改进YOLOv5的复杂场景电动车头盔检测方法
-
测控与自动化技术 | 多障碍环境下巡检机器人路径规划优化研究
测控与自动化技术 | 多障碍环境下巡检机器人路径规划优化研究
-
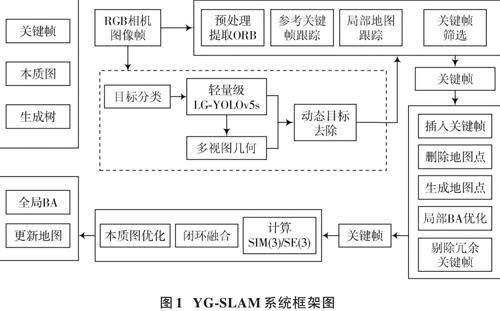
测控与自动化技术 | 基于目标检测和多视图几何的动态SLAM算法
测控与自动化技术 | 基于目标检测和多视图几何的动态SLAM算法
-
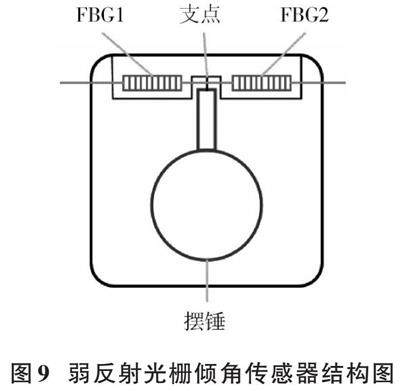
测控与自动化技术 | 基于物联网和弱反射光栅阵列的地质灾害监测系统设计与应用
测控与自动化技术 | 基于物联网和弱反射光栅阵列的地质灾害监测系统设计与应用
-
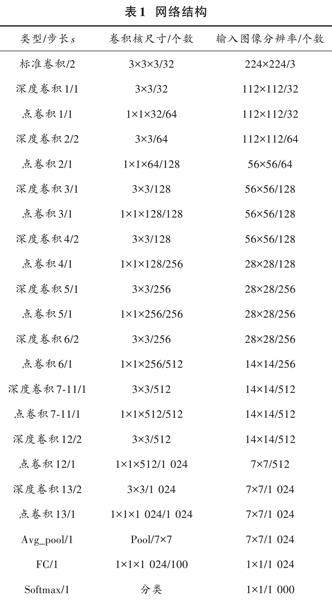
电子技术及应用 | 基于FPGA的MobileNetV1目标检测加速器设计
电子技术及应用 | 基于FPGA的MobileNetV1目标检测加速器设计
-
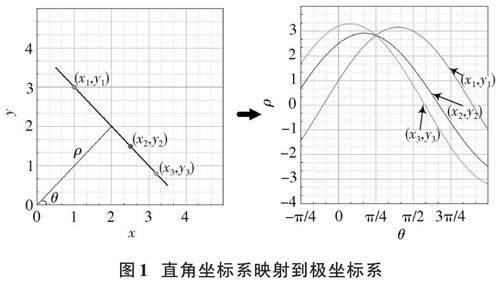
电子技术及应用 | 基于Hough变换和深度学习的条形码识别
电子技术及应用 | 基于Hough变换和深度学习的条形码识别
-
电子技术及应用 | 软硬件协同的RapidIO接口带宽测试方法
电子技术及应用 | 软硬件协同的RapidIO接口带宽测试方法
-

电子技术及应用 | 应用于PLC开发的梯形图向语句表转换的新方法
电子技术及应用 | 应用于PLC开发的梯形图向语句表转换的新方法
-
电子技术及应用 | 基于AI的多模态融合感知综合决策系统设计实现
电子技术及应用 | 基于AI的多模态融合感知综合决策系统设计实现
-
智能交通与导航 | 融合注意力机制的YOLOv8⁃TS交通标志检测网络
智能交通与导航 | 融合注意力机制的YOLOv8⁃TS交通标志检测网络
过往期刊
更多-

现代电子技术
2025年24期 -

现代电子技术
2025年23期 -

现代电子技术
2025年22期 -

现代电子技术
2025年21期 -

现代电子技术
2025年20期 -

现代电子技术
2025年19期 -

现代电子技术
2025年18期 -

现代电子技术
2025年17期 -

现代电子技术
2025年16期 -

现代电子技术
2025年15期 -

现代电子技术
2025年14期 -

现代电子技术
2025年13期 -

现代电子技术
2025年12期 -

现代电子技术
2025年11期 -

现代电子技术
2025年10期 -

现代电子技术
2025年09期 -

现代电子技术
2025年08期 -

现代电子技术
2025年07期 -

现代电子技术
2025年06期 -

现代电子技术
2025年05期 -

现代电子技术
2025年04期 -

现代电子技术
2025年03期 -

现代电子技术
2025年02期 -

现代电子技术
2025年01期








 登录
登录